एक घाव रोटर मोटर शुरू करना
अतुल्यकालिक मोटर के शुरुआती गुण इसके डिजाइन की विशेषताओं पर निर्भर करते हैं, विशेष रूप से रोटर डिवाइस पर।
एक इंडक्शन मोटर की शुरुआत मशीन की एक क्षणिक प्रक्रिया के साथ होती है, जो रोटर के आराम की स्थिति से एकसमान घुमाव की स्थिति से जुड़ी होती है, जिसमें मोटर का टॉर्क प्रतिरोध बलों के क्षण को संतुलित करता है मशीन का शाफ़्ट।
अतुल्यकालिक मोटर शुरू करते समय, आपूर्ति नेटवर्क से विद्युत ऊर्जा की खपत में वृद्धि होती है, जो न केवल शाफ्ट पर लगाए गए ब्रेकिंग टॉर्क को दूर करने और अतुल्यकालिक मोटर में नुकसान को कवर करने के लिए खर्च की जाती है, बल्कि एक निश्चित गतिज संचार के लिए भी होती है। उत्पादन इकाई की चलती लिंक के लिए ऊर्जा। इसलिए, शुरू करते समय, इंडक्शन मोटर को बढ़ा हुआ टॉर्क विकसित करना चाहिए।
रोटर के साथ एक इंडक्शन मोटर के लिए, एन = 1 के साथ स्लिप के अनुरूप शुरुआती टॉर्क रोटर सर्किट में पेश किए गए समायोज्य प्रतिरोधों के सक्रिय प्रतिरोधों पर निर्भर करता है।
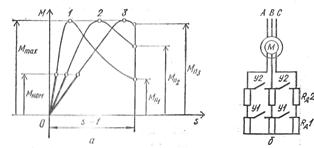
चावल। 1.घाव रोटर के साथ तीन-चरण अतुल्यकालिक मोटर शुरू करना: ए - रोटर सर्किट में प्रतिरोधों के विभिन्न सक्रिय प्रतिरोधों पर स्लिपेज से घाव रोटर के साथ मोटर की टोक़ निर्भरता का ग्राफ, बी - प्रतिरोधों को जोड़ने और संपर्कों को बंद करने के लिए एक सर्किट रोटर सर्किट में त्वरण।
तो, बंद त्वरित संपर्कों के साथ U1, U2, यानी स्लिप रिंग के शॉर्ट सर्किट के साथ इंडक्शन मोटर शुरू करते समय, शुरुआती शुरुआती टॉर्क Mn1 = (0.5 -1.0) Mnom और शुरुआती शुरुआती करंट Azn = ( 4.5 — 7) Aznom और अन्य।
घाव रोटर के साथ एक अतुल्यकालिक इलेक्ट्रिक मोटर का एक छोटा प्रारंभिक टोक़ एक उत्पादन इकाई और इसके बाद के त्वरण को चलाने के लिए अपर्याप्त हो सकता है, और एक महत्वपूर्ण प्रारंभिक चालू मोटर वाइंडिंग के बढ़ते ताप को जन्म देगा, जो इसकी स्विचिंग आवृत्ति को सीमित करता है, और नेटवर्क में कम शक्ति के साथ एक अस्थायी वोल्टेज ड्रॉप होता है जो अन्य रिसीवरों के संचालन के लिए अवांछनीय होता है। ये परिस्थितियाँ कारण हो सकती हैं जो काम करने वाले तंत्र को चलाने के लिए बड़े शुरुआती करंट के साथ घाव-रोटर इंडक्शन मोटर्स के उपयोग को रोकती हैं।

मोटर के रोटर सर्किट में एडजस्टेबल रेसिस्टर्स की शुरूआत, जिसे स्टार्टिंग रेसिस्टर्स कहा जाता है, न केवल शुरुआती शुरुआती करंट को कम करता है, बल्कि एक ही समय में शुरुआती शुरुआती टॉर्क को बढ़ाता है, जो अधिकतम टॉर्क Mmax (मूल 1, a) तक पहुंच सकता है। वक्र 3), यदि चरण-घाव रोटर मोटर की महत्वपूर्ण पर्ची
skr = (R2' + Rd') / (X1 + X2') = 1,
जहाँ Rd' - मोटर रोटर वाइंडिंग के चरण में रोकनेवाला का सक्रिय प्रतिरोध, स्टेटर वाइंडिंग के चरण में कम हो गया।प्रारंभिक अवरोधक के सक्रिय प्रतिरोध को और बढ़ाना अव्यावहारिक है, क्योंकि यह प्रारंभिक शुरुआती टोक़ के कमजोर पड़ने और स्लिप क्षेत्र s> 1 में अधिकतम टोक़ के बिंदु से बाहर निकलने की ओर जाता है, जो रोटर को तेज करने की संभावना को बाहर करता है।
चरण रोटर मोटर को शुरू करने के लिए प्रतिरोधकों का आवश्यक सक्रिय प्रतिरोध प्रारंभिक आवश्यकताओं के आधार पर निर्धारित किया जाता है, जो Mn = (0.1 - 0.4) Mnom होने पर हल्का हो सकता है, सामान्य अगर Mn - (0.5 - 0.75) Mn, और Mn पर गंभीर ≥ मैं।
क्षणिक प्रक्रिया की अवधि को कम करने और मोटर के ताप को कम करने के लिए उत्पादन इकाई के त्वरण के दौरान चरण-घाव रोटर मोटर के साथ पर्याप्त रूप से बड़े टोक़ को बनाए रखने के लिए, सक्रिय प्रतिरोध को धीरे-धीरे कम करना आवश्यक है शुरुआती प्रतिरोधों की। त्वरण एम (टी) के दौरान टोक़ का अनुमेय परिवर्तन विद्युत और यांत्रिक स्थितियों द्वारा निर्धारित पीक टोक़ सीमा एम> 0.85Mmax, स्विचिंग पल एम 2 >> एमएस (छवि 2), साथ ही त्वरण को सीमित करता है।

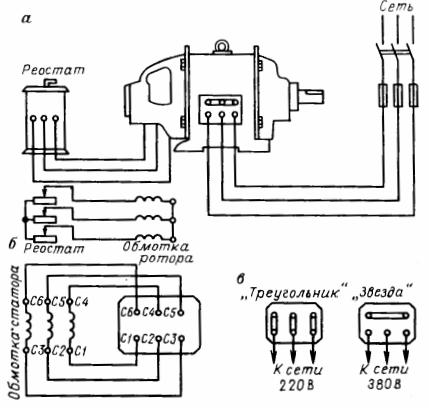
चावल। 2. घाव रोटर के साथ तीन-चरण अतुल्यकालिक मोटर की प्रारंभिक विशेषताएं

स्टार्टिंग रेसिस्टर्स का समावेश त्वरक Y1, Y2 के क्रमिक समावेशन द्वारा सुनिश्चित किया जाता है, क्रमशः t1, t2, इंजन शुरू करने के क्षण से गिना जाता है, जब त्वरण के दौरान टॉर्क M स्विचिंग पल M2 के बराबर हो जाता है। इसलिए, पूरे स्टार्ट-अप के दौरान, सभी पीक टॉर्क समान होते हैं और सभी स्विचिंग टॉर्क एक दूसरे के बराबर होते हैं।
चूंकि घुमावदार रोटर के साथ एसिंक्रोनस मोटर का टोक़ और वर्तमान पारस्परिक रूप से संबंधित हैं, इसलिए रोटर त्वरण I1 = (1.5 - 2.5) Aznom और वर्तमान Az2 स्विचिंग के दौरान चोटी की वर्तमान सीमा निर्धारित करना संभव है, जिसे स्विचिंग पल एम 2 सुनिश्चित करना चाहिए > एम। डिग्री सेल्सियस।
स्टेटर वाइंडिंग के चरणों में ओवरवॉल्टेज की उपस्थिति से बचने के लिए आपूर्ति नेटवर्क से घाव रोटर के साथ अतुल्यकालिक मोटर्स का वियोग हमेशा रोटर सर्किट के शॉर्ट सर्किट के साथ किया जाता है, जो इन चरणों के नाममात्र वोल्टेज से अधिक हो सकता है 3 - 4 बार, अगर मोटर बंद होने पर रोटर सर्किट खुला रहता है।
चावल। 3. एक चरण रोटर के साथ मोटर वाइंडिंग की कनेक्शन योजना: ए - पावर नेटवर्क के लिए, बी - रोटर, सी - टर्मिनल बोर्ड पर।
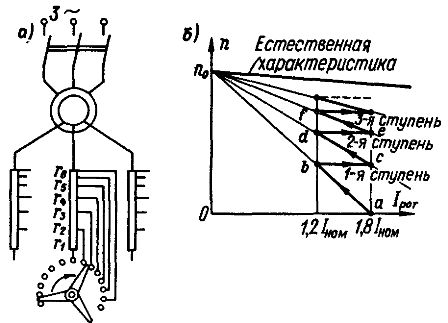
चावल। 4. मोटर को एक चरण रोटर के साथ शुरू करना: ए - स्विचिंग सर्किट, बी - यांत्रिक विशेषताओं