स्टेटर के ध्रुव जोड़े की संख्या को बदलकर प्रेरण मोटर की कोणीय गति का विनियमन
 जैसे-जैसे ध्रुव जोड़े की संख्या बढ़ती है, क्षेत्र का कोणीय वेग घटता जाता है, इसलिए प्रेरण मोटर की रोटर गति भी घट जाती है। विशेष संस्करण दो-गति अतुल्यकालिक मोटर्स, स्टेटर वाइंडिंग जिसमें अलग-अलग हिस्से होते हैं। उन्हें फिर से दो अलग-अलग तरीकों से जोड़ा जा सकता है: एक तारा और एक दोहरा तारा (चित्र 1, ए, बी) या एक त्रिकोण और एक दोहरा तारा (चित्र 1, बी, डी)।
जैसे-जैसे ध्रुव जोड़े की संख्या बढ़ती है, क्षेत्र का कोणीय वेग घटता जाता है, इसलिए प्रेरण मोटर की रोटर गति भी घट जाती है। विशेष संस्करण दो-गति अतुल्यकालिक मोटर्स, स्टेटर वाइंडिंग जिसमें अलग-अलग हिस्से होते हैं। उन्हें फिर से दो अलग-अलग तरीकों से जोड़ा जा सकता है: एक तारा और एक दोहरा तारा (चित्र 1, ए, बी) या एक त्रिकोण और एक दोहरा तारा (चित्र 1, बी, डी)।
एक दोहरे तारे में, क्षेत्र की गति हमेशा एक तारे या त्रिभुज की गति से दोगुनी होती है। हालाँकि, ये स्विच समान नहीं हैं। तथ्य यह है कि निरंतर संचालन के दौरान अधिकतम अनुमेय टोक़ वाइंडिंग्स की हीटिंग स्थितियों के अनुसार अधिकतम अनुमेय चरण वर्तमान द्वारा निर्धारित किया जाता है और चरण वोल्टेज के वर्ग के आनुपातिक स्टेटर प्रवाह पर निर्भर करता है। दीर्घकालिक अनुमेय शक्ति भी समान मूल्यों पर निर्भर करती है।
यदि आप मोटर की वाइंडिंग को स्टार से डबल स्टार में स्विच करते हैं, तो चरण वोल्टेज नहीं बदलेगा, और डेल्टा से डबल स्टार पर स्विच करने पर यह √3 गुना कम हो जाता है। लेकिन डबल स्टार के साथ, प्रत्येक चरण में करंट स्टार या डेल्टा की तुलना में दोगुना हो सकता है, क्योंकि प्रत्येक चरण में दो समानांतर शाखाएँ होती हैं। तब हम पाते हैं कि एक तारे से एक दोहरे तारे में जाने पर, गति और शक्ति दोगुनी हो जाती है, इसलिए महत्वपूर्ण क्षण स्थिर रहता है (M = P /ω= const)।
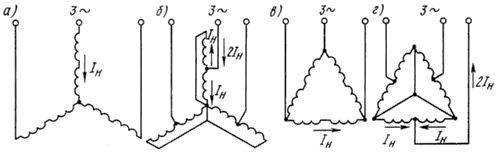
चावल। 1. डेल्टास (सी) और डबल स्टार (डी) में स्टार (ए) और डबल स्टार (बी) में एक अतुल्यकालिक मोटर के स्टेटर वाइंडिंग को जोड़ने की योजना
यदि आप डेल्टा से डबल स्टार तक जाते हैं, तो चरण वोल्टेज √3 गुना कम हो जाता है। फिर, दो चरण के वर्तमान के साथ भी, शक्ति केवल 2/√3 = एल, 18 गुना बढ़ जाएगी और इसे अपरिवर्तित माना जा सकता है। इस मामले में, जैसे ही कोणीय वेग दो के गुणक से बढ़ता है, शक्ति लगभग बदल जाती है, और क्षण लगभग दो के कारक से घट जाता है। इस प्रकार, उठाने वाले उपकरणों को चलाने के लिए मोटरों का उपयोग करने की सिफारिश की जाती है, जिनकी वाइंडिंग स्टार में जुड़ी होती हैं, और धातु काटने की मशीनों को चलाने के लिए, मोटरें जिनकी स्टेटर वाइंडिंग डेल्टा में जुड़ी होती हैं।

चावल। 2. मल्टी-स्पीड मोटर का पासपोर्ट डेटा
दो स्टेटर वाइंडिंग्स के साथ अतुल्यकालिक इलेक्ट्रिक मोटर्स हैं जो एक दूसरे से अलग हैं, उनमें से एक स्विचिंग के बिना है, और दूसरा स्विचिंग पोल के साथ है। उसके बाद, तीन गति वाले इंजन प्राप्त होते हैं। यदि दोनों वाइंडिंग पोल-चेंज हैं, तो मोटर चार-चरण वाली होती हैं। कुछ मामलों में, अलग-अलग संख्या में पोल जोड़े के साथ दो इंसुलेटेड वाइंडिंग का उपयोग किया जाता है। पीपी स्विचिंग के बिना।उदाहरण के लिए, एलेवेटर मोटर्स में p1 = 3 और p2 = 12, जो 1000 और 250 आरपीएम की समकालिक रोटेशन गति से मेल खाती है।
अंजीर में। 3a टू-स्पीड स्टार-टू-डबल-स्टार मोटर और FIG के लिए यांत्रिक विशेषताओं को दर्शाता है। 3, b - त्रिभुज से दोहरे तारे में बदलते समय।
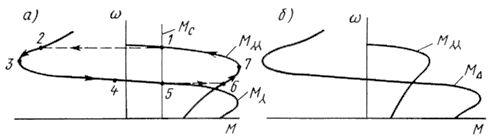
चावल। 3 ... स्टार से डबल स्टार (ए) और डेल्टा से डबल स्टार (बी) में स्विच करते समय अतुल्यकालिक इलेक्ट्रिक मोटर्स की यांत्रिक विशेषताएं
उच्च गति से कम गति में त्वरित बदलाव की स्थिति में, इंजन कुछ समय के लिए चलता है। निलंबन मोड… वास्तव में, यदि क्षेत्र की गति कम हो जाती है, तो पहले क्षण में रोटर उसी गति से घूमता रहता है।
इंजन तुरन्त एक विशेषता से दूसरी विशेषता पर स्विच करता है, अर्थात। बिंदु 1 से बिंदु 2 तक (चित्र 3, ए)। पुनर्योजी ब्रेकिंग इस प्रकार है (अंक 2, 3, 4), बिंदु 5 पर यह स्थिर अवस्था में काम करना शुरू कर देता है। यदि आप कम गति से उच्च गति पर स्विच करते हैं, तो मोटर तुरन्त बिंदु 5 से बिंदु b तक जाती है, फिर त्वरण (अंक 6 और 7) का अनुसरण करता है और बिंदु 1 पर एक संतुलन स्थिति फिर से प्रकट होती है।