ओवरहेड क्रेन के साथ इलेक्ट्रिक ट्रॉली ड्राइव
एक ओवरहेड क्रेन के साथ एक ट्रॉली एक उठाने वाले उपकरण का एक स्वतंत्र तत्व है और इसे ओवरहेड क्रेन की सीमा के भीतर तकनीकी रूप से गति की गति और लोड की स्थिति की आवश्यक सटीकता के साथ लोड करने के लिए डिज़ाइन किया गया है। बोगी ड्राइव ओवरहेड क्रेन उपकरण के मुख्य घटकों में से एक है।
ट्रॉली ओवरहेड क्रेन के ट्रैक पर चलती है। पुल स्वयं गाड़ी की गति की दिशा के लंबवत दिशा में चलता है। गाड़ी पर एक लिफ्टिंग मैकेनिज्म स्थापित किया गया है, जो एक हुक (या इलेक्ट्रोमैग्नेट) से लैस है जिसके साथ आप लोड को स्थानांतरित कर सकते हैं। बोगी की आवाजाही ओवरहेड क्रेन (चित्र 1) के तकनीकी चक्र का एक अभिन्न अंग है।
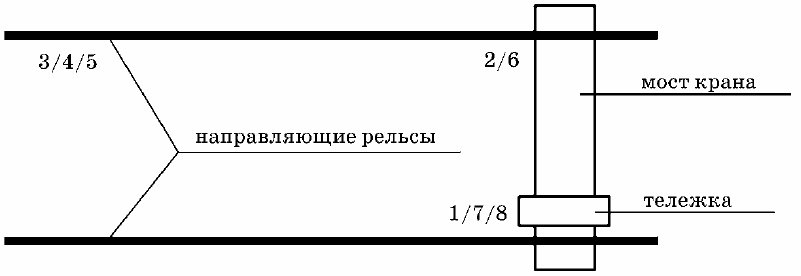
चावल। 1. कार्य चक्र में पुल क्रेन के साथ संचालन करने की योजना
इस चक्र में निम्नलिखित संक्रियाएँ होती हैं (चित्र 1 में, संक्रियाएँ संख्याओं में दर्शाई गई हैं):
1 - भार उठाना;
2 - गाड़ी को किसी दिए गए स्थान पर ले जाना;
3 - क्रेन को पूर्व निर्धारित स्थिति में ले जाना;
4 - बोझ का वजन कम करना;
5 - भार के भार के साथ हुक उठाना;
6 - क्रेन को उसकी मूल स्थिति में ले जाना;
7 - गाड़ी को उसकी मूल स्थिति में ले जाना;
8 - हुक कम करना।
जैसा कि ओवरहेड क्रेन के प्रक्रिया चक्र से देखा जा सकता है, ट्रॉली ड्राइव मोटर को दूसरे और सातवें ऑपरेशन में चालू किया जाता है। जब बोगी ओवरहेड क्रेन की दूरी में किसी दिए गए स्थान पर पहुंचती है, तो आवश्यक ब्रेकिंग सटीकता सुनिश्चित करने के लिए बोगी ड्राइव की इलेक्ट्रिक मोटर को विद्युत रूप से ब्रेक किया जाता है।
फिर इंजन को बंद कर दिया जाता है और एक यांत्रिक ब्रेक लगाया जाता है। इसके अलावा, ब्रिज मूवमेंट का इलेक्ट्रिक ड्राइव चालू होता है और तकनीकी कार्य के अनुसार वर्कशॉप के साथ लोड चलता है। निर्दिष्ट स्थान पर पहुंचने पर, क्रेन बंद हो जाती है, भार कम हो जाता है, और फिर आवश्यक तकनीकी संचालन किया जाता है।

ओवरहेड क्रेन के साथ ट्रॉली आंदोलन तंत्र का कीनेमेटिक आरेख चित्र 2 में दिखाया गया है। ट्रॉली आंदोलन तंत्र को ड्राइव पहियों के बीच में गियरबॉक्स के साथ योजना के अनुसार बनाया गया है।
इलेक्ट्रिक मोटर डी से ब्रेक डिस्क टी, गियरबॉक्स पी, क्लच एम और शाफ्ट बी के माध्यम से चलने वाले पहियों को प्रेषित किया जाता है। गाड़ी को स्थिर रखने के लिए ब्रेक पुली का उपयोग किया जाता है।
गाड़ी में चार यात्रा पहिए और दो ड्राइव पहिए हैं। क्रेन ट्रॉलियों के यात्रा पहिए आमतौर पर दो पसलियों से बने होते हैं।
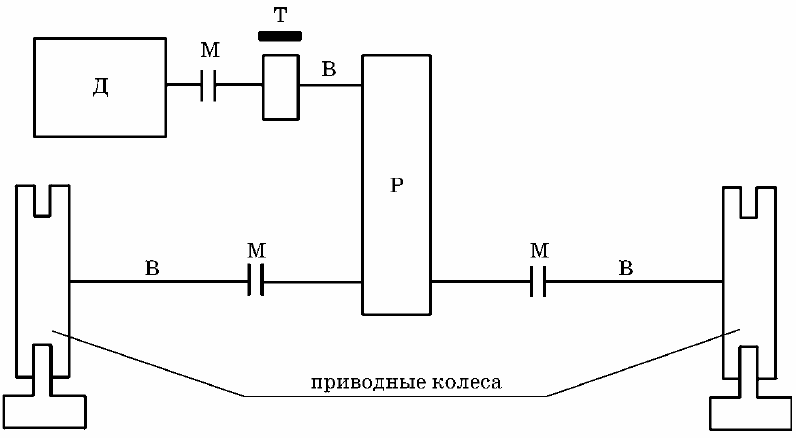
चावल। 2. ट्रॉली आंदोलन तंत्र का काइनेमैटिक आरेख
कार्ट को निर्दिष्ट स्थान पर ले जाने का समय आवश्यक त्वरण के साथ कार्ट को गति देने और धीमा करने के समय को ध्यान में रखकर निर्धारित किया जाएगा।तकनीकी प्रक्रिया की शर्तों के आधार पर, गाड़ी चलाते समय टैकोग्राम में चित्र 3 में दिखाया गया रूप होना चाहिए।
आवश्यक त्वरण के साथ एक निश्चित गति के लिए बोगी तंत्र की सुचारू शुरुआत सुनिश्चित करना आवश्यक है। आवश्यक पोजिशनिंग सटीकता सुनिश्चित करने के लिए, कम गति के संक्रमण के साथ इलेक्ट्रिक ड्राइव की एक चिकनी मंदी की आवश्यकता होती है, जिसके बाद ट्रॉली बंद हो जाती है।
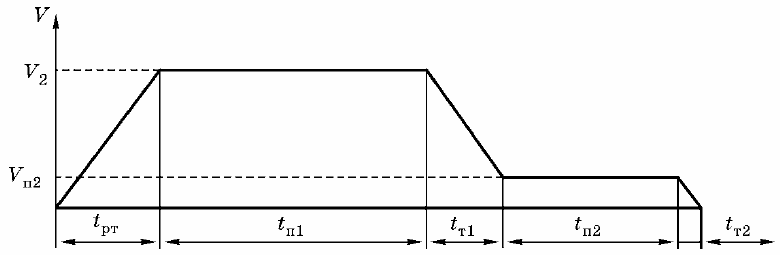
चावल। 3. ट्रॉली आंदोलन तंत्र का टैचोग्राम
रेल जोड़ों में धातु संरचना पर प्रभाव के साथ बोगी की गति, तीव्र त्वरण और मंदी, धातु संरचना के प्राकृतिक कंपन जब मशीनों को लोड किया जाता है, तो पुल क्रेन बोगी पर स्थित विद्युत उपकरणों पर बहुत तीव्र यांत्रिक प्रभाव पड़ता है। इसके आधार पर, ट्रॉली को चलाने के लिए इलेक्ट्रिक ड्राइव को निम्नलिखित आवश्यकताओं को पूरा करना चाहिए:
1) इलेक्ट्रिक ड्राइव को तंत्र को गति में शुरू करने की क्षमता प्रदान करनी चाहिए, आंदोलन की दिशा को उलट देना चाहिए और तंत्र को आवश्यक त्वरण (एम / एस 2) और सही स्थिति सटीकता (मिमी) के साथ रोकना चाहिए;
2) इलेक्ट्रिक ड्राइव को मुख्य से नीचे की ओर सुचारू गति नियंत्रण प्रदान करना चाहिए;
3) विकसित इंजन टॉर्क को एक निश्चित तीव्रता पर तंत्र के संचालन को सुनिश्चित करना चाहिए;
4) प्रति घंटे शुरू होने वाले इंजन की दी गई संख्या के साथ, इसकी वाइंडिंग की अधिकता नहीं होनी चाहिए, जिसके कारण तंत्र का लंबे समय तक रुकना संभव है;
5) मोटर को परिचालन स्थितियों के अनुसार चुना जाना चाहिए, अर्थात, इसका एक उपयुक्त डिज़ाइन होना चाहिए, और इसकी वाइंडिंग्स गर्मी प्रतिरोधी होनी चाहिए और नमी के खिलाफ इन्सुलेशन होना चाहिए;
6) ड्राइव मोटर में सबसे छोटा चक्का द्रव्यमान होना चाहिए जो लगातार ड्राइव शुरू होने के दौरान यात्रियों के प्रवाह पर महत्वपूर्ण प्रभाव डालता है;
7) ड्राइव मोटर को चलने वाले तंत्र की शक्ति से मेल खाना चाहिए और आवश्यक अधिभार क्षमता होनी चाहिए;
8) इलेक्ट्रिक ड्राइव को न्यूनतम अवधि के साथ क्षणिक प्रक्रियाओं का गठन सुनिश्चित करना चाहिए;
9) इलेक्ट्रिक ड्राइव के डिजाइन में सुरक्षा और रखरखाव में आसानी को ध्यान में रखा जाना चाहिए।

एक उत्पादन सुविधा में एक क्षैतिज ट्रैक लाइन पर काम करने वाले गति तंत्र के लिए स्थिर क्षण बीयरिंगों में फिसलने वाले घर्षण बलों और ओवरहेड क्रेन की पटरियों पर लुढ़कने वाले बोगी पहियों के रोलिंग घर्षण द्वारा बनाया जाता है। ट्रॉली के आगे बढ़ने के दौरान तंत्र का स्थिर क्षण क्रेन की उठाने की क्षमता से निर्धारित होता है। बोगी के रिवर्स मूवमेंट के दौरान तंत्र के स्थिर क्षण की गणना अधूरे भार के लिए की जाती है।
ओवरहेड क्रेन की ट्रॉली के इलेक्ट्रिक ड्राइव के लिए, अतुल्यकालिक गिलहरी-पिंजरे रोटर मोटर्स (incl एक चर आवृत्ति ड्राइव के हिस्से के रूप में), घाव रोटर प्रेरण मोटर्स और स्वतंत्र रूप से उत्साहित डीसी मोटर्स।