तंत्र की गति का पिस्टन नियंत्रण
रिले सर्किट
 अंजीर में। 1 SQ नियंत्रक द्वारा निर्धारित निरंतर स्ट्रोक पिस्टन गति नियंत्रण योजनाओं के विभिन्न रूपों को दिखाता है।
अंजीर में। 1 SQ नियंत्रक द्वारा निर्धारित निरंतर स्ट्रोक पिस्टन गति नियंत्रण योजनाओं के विभिन्न रूपों को दिखाता है।
अंजीर में आरेख। 1, a-c का उपयोग तब किया जाता है जब चक्र में एक "फॉरवर्ड" मूवमेंट B और एक "बैकवर्ड" मूवमेंट H प्रारंभिक स्थिति में होता है। स्कीम 1, ए और बी का उपयोग केक्यू रिले द्वारा दिए गए स्वचालित कमांड के साथ किया जाता है। केटी रिले रिवर्स शुरू करने से पहले विराम प्रदान करता है। अंजीर के आरेख में। 1, साइकिल स्टार्ट कमांड कंट्रोलर या यूनिवर्सल स्विच एसएम द्वारा दिया जाता है।
अनंत प्रत्यागामी गति को लागू करने के लिए, अंजीर में चित्र। 1, डी। यदि स्ट्रोक की संख्या किसी दिए गए मान n द्वारा सीमित होनी चाहिए, तो गिनती रिले का एक खुला संपर्क या कई रिले की एक इकाई, जो "बैक" संपर्ककर्ता KM2 के समापन संपर्क द्वारा आपूर्ति की गई दालों की गणना करती है, है संपर्ककर्ता सर्किट «आगे» KM1 में शामिल।
चर स्ट्रोक लंबाई के साथ चार स्थितियों में एक पारस्परिक गति को लागू करने का एक उदाहरण अंजीर में दिखाया गया है। 2.कमांड डिवाइस SQ के संपर्क SQ.1- SQ.4- का उपयोग तंत्र को वैकल्पिक रूप से "फॉरवर्ड" स्ट्रोक की स्थिति 1—4 में बंद करने के लिए किया जाता है, प्रारंभिक स्थिति में SQ.5- से संपर्क करें। सर्किट ऑटोमेशन रिले KQ1 द्वारा दिए गए पल्स कमांड का उपयोग करता है, जो बंद है, उदाहरण के लिए, वर्कपीस को खिलाते समय, और KQ2, जो प्रत्येक स्ट्रोक के अंत में मध्यवर्ती ऑपरेशन के अंत को ठीक करता है।
अनुक्रमिक पैंतरेबाज़ी SQ.1 - SQ नियंत्रक के SQ.3 को "बैक" तंत्र KS1, KSZ और KS5 की चालों की संख्या की गणना के लिए रिले के संपर्कों द्वारा किया जाता है। रिले KS7, "बैक" की चौथी चाल को ठीक करते हुए, रिले KS1-KC6 को बंद कर देता है और अगले स्विचिंग को "फॉरवर्ड" पर रोक देता है, जब तक कि ब्लैंक के इस समूह (रिले KR) के साथ तकनीकी संचालन के अंत में ब्लू नहीं आ जाता है। KC7 कॉइल सर्किट में KR रिले का शुरुआती संपर्क सर्किट को उसकी मूल स्थिति में लौटा देता है।
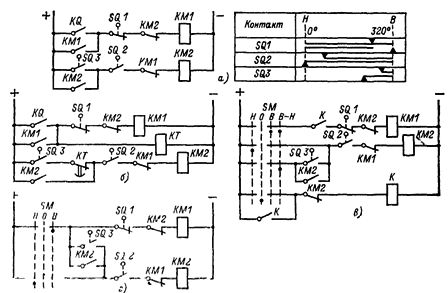
चावल। 1. पारस्परिक गति के लिए रिले नियंत्रण सर्किट
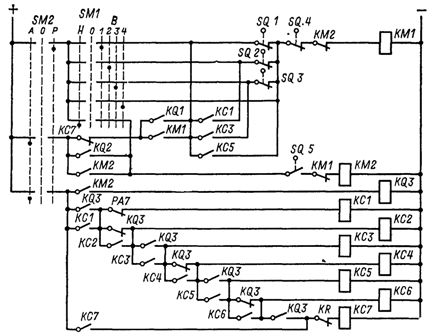
चित्रा 2. परिवर्तनीय स्ट्रोक लंबाई के साथ पारस्परिक रिले की नियंत्रण योजना
तर्क सर्किट
«लॉजिक टी» श्रृंखला के तत्वों पर बने पिस्टन मूवमेंट कंट्रोल सर्किट को अंजीर में दिखाया गया है। 3. तर्क तत्वों के साथ इनपुट रिले सिग्नल को समन्वयित करने के लिए T-201 प्रकार के तत्व D1-D3 का उपयोग किया जाता है।
तत्वों की स्मृति D4.1, D4.2 रिले KQ को स्पंदित होने पर "आगे" स्थानांतरित करने के लिए एक कमांड की उपस्थिति को ठीक करता है। प्रवर्धक D5 के माध्यम से, सामने का संपर्ककर्ता KM1 चालू होता है। "आगे" तंत्र के आंदोलन के अंत में, जब नियंत्रक SQ 1 का संपर्क बंद हो जाता है, तो संबंधित तत्व D2 के आउटपुट पर एक संकेत 1 दिखाई देता है, जो मेमोरी D4 और संपर्ककर्ता KM1 को बंद कर देता है और चालू हो जाता है तत्वों पर स्मृति D6। इस मामले में, "वापस" स्थानांतरित करने का आदेश दिया जाता है और याद किया जाता है।यह कमांड हटा दिया जाता है और बैकवर्ड मूवमेंट रोक दिया जाता है जब कंट्रोलर SQ 2 का संपर्क प्रारंभिक स्थिति में बंद हो जाता है, जब सिग्नल 1 संबंधित तत्व D3 के आउटपुट पर दिखाई देता है, मेमोरी D6 को अक्षम करता है।
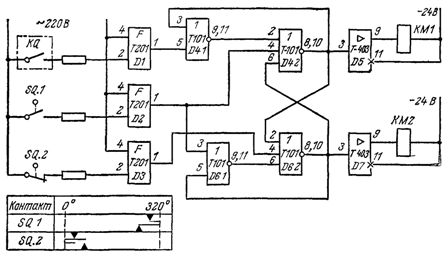
चावल। 3. «तर्क टी» श्रृंखला के तत्वों पर पारस्परिक आंदोलन को नियंत्रित करने के लिए योजना
मेमोरी D4 और D6 अवरुद्ध हैं, इसलिए उनमें से केवल एक को ही चालू किया जा सकता है। जब मेमोरी D4 चालू होती है, तो तत्व D4.2 के आउटपुट से सिग्नल 1 तत्व D6.2 के इनपुट 2 को खिलाया जाता है, मेमोरी D6 को अक्षम करता है और इसके विपरीत। जब मेमोरी D6 को चालू किया जाता है, तो तत्व D6 2 के आउटपुट से सिग्नल 1 तत्व D4.2 के इनपुट 6 को खिलाया जाता है, जिससे मेमोरी D4 अक्षम हो जाती है।