कोल्हू कनेक्शन आरेख
 विभिन्न प्रकार के क्रशर का उपयोग चारे के दानों और रौगे को कुचलने के लिए किया जाता है। कार्य सिद्धांत और डीबी प्रकार छलनी छलनी के नियंत्रण का सर्किट आरेख चित्र 1 में दिखाया गया है।
विभिन्न प्रकार के क्रशर का उपयोग चारे के दानों और रौगे को कुचलने के लिए किया जाता है। कार्य सिद्धांत और डीबी प्रकार छलनी छलनी के नियंत्रण का सर्किट आरेख चित्र 1 में दिखाया गया है।
बरमा 8 (चित्र 1) का उपयोग करके पीसने वाले अनाज को हॉपर 9 में लोड किया जाता है, जिसका स्तर स्वचालित रूप से दो सेंसर से मिली जानकारी के आधार पर बनाए रखा जाता है। पीसने के लिए अनाज की आपूर्ति को एक स्पंज 10 द्वारा नियंत्रित किया जाता है। इस मामले में, पेराई के उत्पाद को वायु प्रवाह द्वारा आपूर्ति लाइन के माध्यम से फ़िल्टर 6 तक पहुँचाया जाता है।
पर्याप्त रूप से कुचला हुआ अनाज जो स्क्रीन सेपरेटर 4 से होकर गुजरा है, एक तैयार उत्पाद है, जिसे बरमा 2 से छुट्टी दे दी जाती है। बाकी को पेराई कक्ष में लौटा दिया जाता है, और इस उत्पाद की मात्रा ऑपरेटर द्वारा विनियमन वाल्व 5 का उपयोग करके निर्धारित की जाती है ( अत्यधिक सही स्थिति में, सभी सामग्री बिना विभाजन के डिस्चार्ज हो जाती है)। धूल भरी हवा का एक हिस्सा श्रेडिंग चैंबर में वापस आ जाता है, और दूसरा हिस्सा, फिल्टर 6 से गुजरते हुए, वातावरण में डिस्चार्ज हो जाता है।
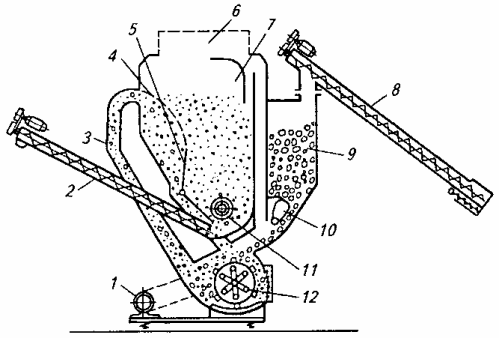
चावल। 1.DB-5 कोल्हू का कार्यात्मक आरेख: 1 - इंजन, 2, 8 - ऑगर्स, 3 - वायु वाहिनी, 4 - विभाजक, 5, 10 - सदमे अवशोषक, 6 - फ़िल्टर, 7 - कक्ष, 9 - अनाज हॉपर, 11 - आंदोलनकारी, 12 - रोटर
कोल्हू का नियंत्रण सर्किट (चित्र 2) अनलोडिंग ऑगर मोटर्स (एम 1) और फिर कोल्हू (एम 2) की अनुक्रमिक शुरुआत प्रदान करता है, और प्रारंभिक वर्तमान को कम करने के लिए, कोल्हू मोटर एक «स्टार» सर्किट में जुड़ा हुआ है, और फिर एक "डेल्टा" सर्किट पर स्विच किया गया। खाली कोल्हू हॉपर के साथ SB6 बटन दबाकर फिलिंग बरमा शुरू किया जाता है।
बरमा तब तक काम करता है जब तक हॉपर में अनाज के ऊपरी स्तर पर झिल्ली सेंसर के SL1 संपर्क बंद नहीं हो जाते। संपर्क SL1 द्वारा बाईपास किए जाने पर चुंबकीय स्टार्टर KM4 और रिले KV डी-एनर्जेटिक हो जाते हैं। हॉपर को खाली करने और ऊपरी स्तर SL1 और निचले SL2 के सेंसर के संपर्क खोलने के बाद बरमा भी स्वचालित रूप से फिर से चालू हो जाता है।
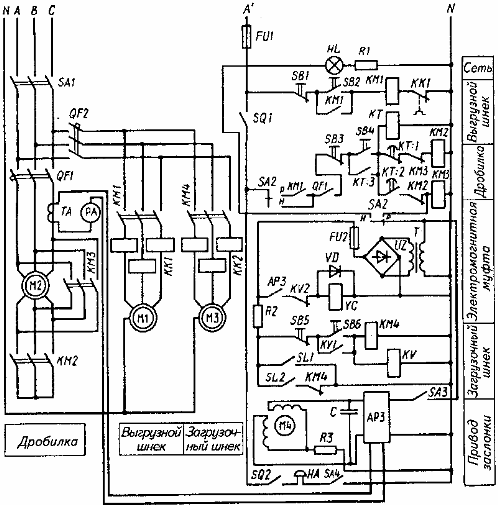
चावल। 2. कोल्हू का विद्युत आरेख
स्वचालित लोड नियामक (एआरजेड) के आदेश के तहत एम 4 एक्ट्यूएटर द्वारा स्थानांतरित एक विनियमन वाल्व के माध्यम से कोल्हू की क्षमता स्वचालित रूप से नियंत्रित होती है।
मोटर के एक महत्वपूर्ण अधिभार और बिजली की आपूर्ति में रुकावट की स्थिति में, विद्युत चुम्बकीय क्लच YC, जो सदमे अवशोषक को IM से जोड़ता है, संपर्क ARZ से डिस्कनेक्ट हो जाता है, सदमे अवशोषक अपने स्वयं के वजन और आपूर्ति के अंतर्गत आता है पेराई कक्ष में अनाज बंद हो जाता है।
जब लिमिट स्विच SQ2 बंद हो जाता है, तो डैपर का पूरा खुलना, क्रशर लोड में कमी का संकेत देता है, HA हॉर्न द्वारा संकेत दिया जाता है।
चॉपर्स, चाकू या हथौड़ों का इस्तेमाल घास और भूसे को काटने के लिए किया जाता है।कुचलने के लिए कच्चे माल को फीड हॉपर में खिलाया जाता है, जो इसे घुमाता है, इसे पेराई कक्ष के रोटर के हथौड़ों के नीचे फेंक देता है। कुचल द्रव्यमान को रोटरी हथौड़ों द्वारा उत्पन्न वायु प्रवाह द्वारा कक्ष से बाहर किया जाता है।
नियंत्रण सर्किट कोल्हू के इंजनों की क्रमिक शुरुआत और फिर (20 एस के बाद) हॉपर सुनिश्चित करता है। इस मामले में, मोटर को "स्टार" सर्किट से "डेल्टा" सर्किट में स्विच करके कोल्हू शुरू किया जाता है।
क्रशर मोटर पर ओवरलोड होने की स्थिति में, इलेक्ट्रोमैग्नेटिक क्लच को थोड़े समय के लिए बंद कर दिया जाता है और क्रशर को फीड करना बंद कर दिया जाता है। क्रशर पर लोड कम करने के बाद बिजली चालू कर दी जाती है। यदि मोटर अधिभार 20 एस से अधिक रहता है, तो हॉपर ड्राइव मोटर बंद हो जाती है।