कई स्थानों से इलेक्ट्रिक ड्राइव नियंत्रण योजनाएं
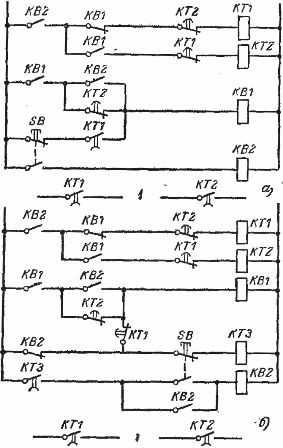
 निरंतर प्रक्रिया लाइनों के लिए, जहां ड्राइव मुख्य रूप से एक दिशा (आगे) में काम करते हैं और रिवर्सल दुर्लभ हैं, ब्रेकर के माध्यम से "फॉरवर्ड" ऑपरेशन के लिए लाइन कॉन्टैक्टर को शामिल करने के साथ सर्किट (छवि 1) का उपयोग करने की सिफारिश की जाती है, और "रिवर्स" ऑपरेशन के लिए - केएमआर संपर्ककर्ता के सक्रिय संपर्कों के माध्यम से। यह व्यवस्था ड्राइव को पसंदीदा दिशा में शुरू करने के लिए समय कम करती है।
निरंतर प्रक्रिया लाइनों के लिए, जहां ड्राइव मुख्य रूप से एक दिशा (आगे) में काम करते हैं और रिवर्सल दुर्लभ हैं, ब्रेकर के माध्यम से "फॉरवर्ड" ऑपरेशन के लिए लाइन कॉन्टैक्टर को शामिल करने के साथ सर्किट (छवि 1) का उपयोग करने की सिफारिश की जाती है, और "रिवर्स" ऑपरेशन के लिए - केएमआर संपर्ककर्ता के सक्रिय संपर्कों के माध्यम से। यह व्यवस्था ड्राइव को पसंदीदा दिशा में शुरू करने के लिए समय कम करती है।
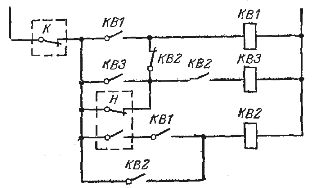
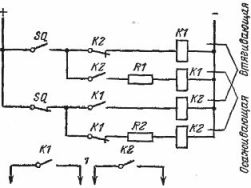
अंजीर में आरेख। 2 एक चलती हुई वस्तु से विद्युत मोटर के दूरस्थ प्रतिवर्ती नियंत्रण की अनुमति देता है। इस सर्किट का उपयोग किया जाता है, उदाहरण के लिए, क्रेन से हीटिंग कुएं के मोटर्स को नियंत्रित करने के लिए। सिग्नल सर्किट और विभिन्न सिग्नलों का स्वागत अंजीर में दिखाया गया है। 3 - 9।
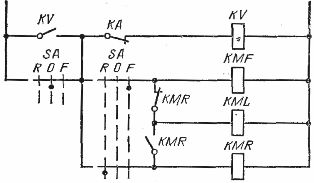
चावल। 1. दुर्लभ रियर "रियर" के साथ रियर इंजन कंट्रोल स्कीम।
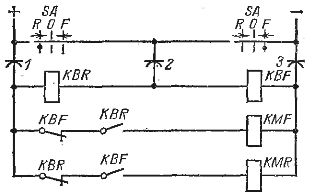
चावल। 2. नियंत्रण ट्रोल के माध्यम से मोटर के प्रतिवर्ती नियंत्रण की योजना।
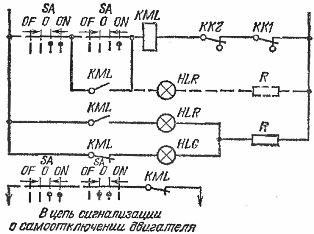
चावल। 3. अपरिवर्तनीय विद्युत ड्राइव की स्थिति को संकेत देने की योजना।
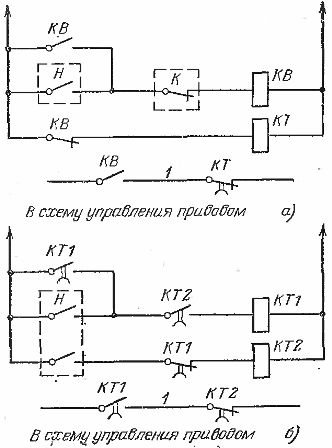
चावल। 4.एक लंबे (ए) और स्पंदित (बी) सिग्नल के संपर्क में आने के बाद समय की देरी के साथ एक संकेत प्राप्त करने के लिए सर्किट: के - अनलॉकिंग संपर्क, 1 - ड्राइव के नियंत्रण सर्किट से संपर्क।
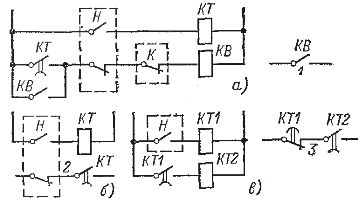
चावल। 5. सिग्नल एच लॉन्ग (ए), पल्स (बी), पल्स विद टाइम डिले (सी) के बीट (पूंछ से) के अंत के बाद सिग्नल प्राप्त करने की योजना। K — अनलॉकिंग कॉन्टैक्ट, 1, 2, 3 — ड्राइव कंट्रोल सर्किट से कॉन्टैक्ट्स।
चावल। 6. माध्यमिक एच की शुरुआत के बाद एक लंबा संकेत प्राप्त करने की योजना।
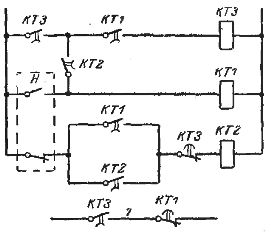
चावल। 7. सिग्नल H (KT1 0.2-0.8 s; KT2 0.3 s; KTZ 0.5 s) की द्वितीयक क्रिया के बाद समय की देरी के साथ पल्स सिग्नल प्राप्त करने की योजना। 1 - ड्राइव कंट्रोल सर्किट से संपर्क।
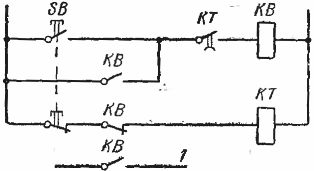
चावल। 8. बटन दबाने की अवधि की परवाह किए बिना एक निश्चित अवधि का संकेत प्राप्त करने की योजना: 1 - ड्राइव कंट्रोल सर्किट से संपर्क करें।
एक निश्चित संख्या में संचालन या चक्रों की गिनती के बाद गणना योजनाओं का उपयोग स्वचालित रूप से ड्राइव को प्रभावित करने के लिए किया जाता है। वे क्लोजर और ओपनिंग (चित्र 10), केवल क्लोजर (चित्र 11), या केवल ओपनिंग (चित्र 12) की गणना कर सकते हैं।
संकेतित योजनाओं के अनुसार दालों की गिनती फोटो रिले संपर्क, गति स्विच या अन्य उपकरणों से की जाती है।
अंजीर में दिखाई गई गिनती योजना में। 10, REV850 रिले का उपयोग आर्मेचर के चुंबकीय "चिपके" के साथ किया जाता है, और इसलिए इस सर्किट में वोल्टेज की आपूर्ति में रुकावट गिनती को परेशान नहीं करती है। अन्य काउंटिंग सर्किट में, जब वोल्टेज की आपूर्ति बाधित होती है, तो पल्स काउंट का नुकसान होता है।
खाता योजना की वैधता की जांच करने के लिए (चित्र 11), नियंत्रण बटन... हर बार जब आप SB0N बटन दबाते हैं, तो सर्किट एक गिनती करता है। काउंटर को रीसेट करने के लिए SB0F बटन का उपयोग किया जाता है।इस तरह के बटन दूसरी योजनाओं में भी दिए जा सकते हैं।
चावल। 9. एक बटन को क्रमिक रूप से दबाकर दो अलग-अलग सर्किट में सिग्नल प्राप्त करने के लिए सर्किट: ए - सिग्नल की अवधि बटन दबाने की अवधि के बराबर होती है, बी - सिग्नल की अवधि बटन दबाने की अवधि पर निर्भर नहीं होती है , 1 - ड्राइव कंट्रोल सर्किट से संपर्क।
चावल। 10. खाते की योजना दो तक।
प्रत्येक संख्या के लिए दालें एक समापन और सीमा स्विच SQ के संपर्क का एक उद्घाटन हैं; 1 - ड्राइव कंट्रोल सर्किट से संपर्क।
अंजीर के सर्किट में दालों की गिनती। 11, 12 SQ संपर्क के अल्पकालिक क्लोजर (उद्घाटन) हैं, और इस संपर्क की बंद स्थिति आवेग संपर्ककर्ता KNA और एक रिले KB (KL) को चालू करने के लिए पर्याप्त होनी चाहिए।
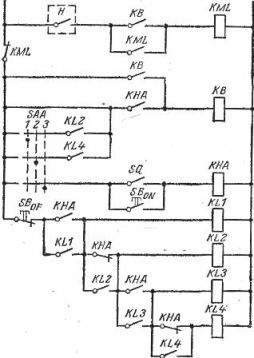
चावल। 11. संपर्क SQ बंद होने पर तीन तक गिनने की योजना।
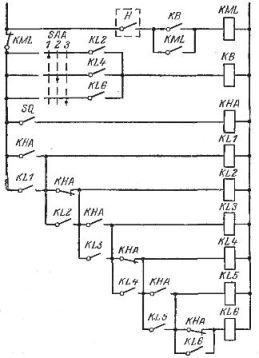
चावल। 12. SQ संपर्क खोलते समय तीन तक गिनने की योजना
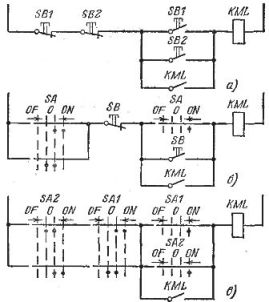
चावल 13. दो स्थानों से इंजन के अपरिवर्तनीय नियंत्रण की योजनाएं: ए - दो बटन के साथ, बी - एक बटन और एक कुंजी के साथ, सी - दो चाबियों के साथ।
चावल। 14. दो स्थानों से एक इलेक्ट्रिक ड्राइव के एक तरफा आश्रित प्रतिवर्ती नियंत्रण की योजना।
गिनती KML लाइन संपर्ककर्ता द्वारा रीसेट की जाती है; SQ संपर्ककर्ता का बंद समय KML संपर्ककर्ता के समय से कम होना चाहिए।
उपरोक्त योजनाओं के अनुरूप थोड़ी बड़ी संख्या के लिए गणना योजनाएं तैयार की जा सकती हैं, लेकिन जब गिनती पांच या आठ से अधिक हो, या ऐसे मामलों में जहां वोल्टेज गायब होने पर गिनती का नुकसान अस्वीकार्य है, तो गिने हुए का उपयोग करने की सिफारिश की जाती है रिले।
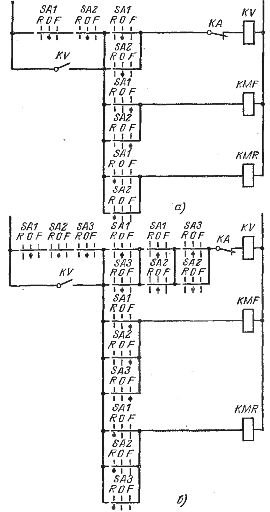
चावल। 15. निर्भर प्रतिवर्ती इंजन नियंत्रण की योजनाएं: ए - दो स्थानों से, बी - तीन स्थानों से
30 काउंट तक के लिए टाइप E-526 मोटर स्टेप काउंट रिले या 75 पल्स काउंट तक टाइप E 531 पल्स काउंट रिले का उपयोग किया जा सकता है। रिले अल्टरनेटिंग करंट पर काम करते हैं और उनके संपर्क क्रमशः 220 V पर पावर-ऑफ को सक्षम करते हैं और डीसी 50 और 30 वाट।
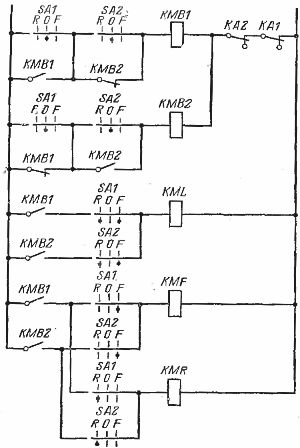
कई स्थानों से इलेक्ट्रिक मोटर्स के नियंत्रण सर्किट निर्भर, अप्रत्यक्ष रूप से निर्भर और स्वतंत्र हो सकते हैं (चित्र 13)। सबसे अधिक बार, निर्भर नियंत्रण योजनाओं का उपयोग सरलतम के रूप में किया जाता है (चित्र 15)। इन योजनाओं के अनुसार, किसी भी नियंत्रण उपकरण का संचालन करते समय, किसी अन्य उपकरण के हैंडल को शून्य से ऑपरेटिंग स्थिति में ले जाने से मोटर बंद हो जाती है।
दो (चित्र 14) और तीन (चित्र 16) स्थानों से एक तरफ़ा निर्भर नियंत्रण की योजनाओं के अनुसार, स्विच SA1 को स्विच SA2 (SA2 और SA3) की स्थिति से स्वतंत्र रूप से नियंत्रित किया जा सकता है। SA2 स्विच का नियंत्रण तब संभव है जब SA1 स्विच शून्य स्थिति में हो और SA3 स्विच की स्थिति पर निर्भर न हो। SA1 और SA2 स्विच शून्य स्थिति में होने पर SA3 स्विच का नियंत्रण संभव है।
चित्रा 16. तीन जगह पारस्परिक मोटर के यूनिडायरेक्शनल निर्भर नियंत्रण की योजनाबद्ध
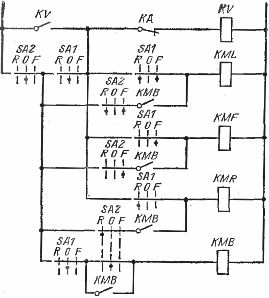
चावल। 17. दो स्थानों से इंजन के स्वतंत्र प्रतिवर्ती नियंत्रण की योजना।
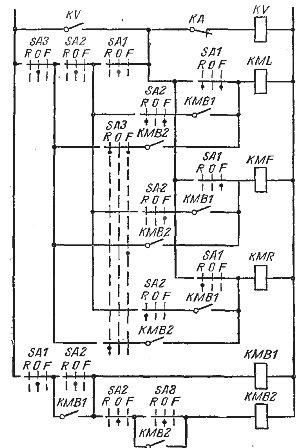
चावल। 18. तीन स्थानों से इंजन के स्वतंत्र प्रतिवर्ती नियंत्रण की योजना।
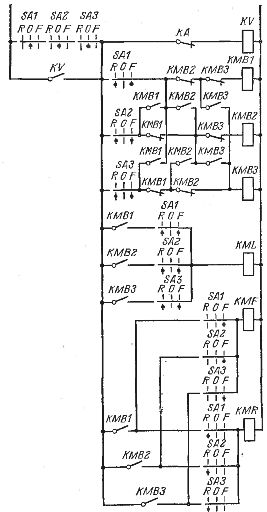
स्वतंत्र नियंत्रण योजनाओं (अंजीर। 17 और 18) में, जब ड्राइव को किसी पहले स्विच (SA1, SA2 या SA3) द्वारा नियंत्रित किया जाता है, तो दूसरे स्विच के हैंडल को हिलाने से ड्राइव का संचालन प्रभावित नहीं होता है। पहली कुंजी के हैंडल की शून्य स्थिति पर लौटने के बाद, दूसरी कुंजी (या दो अन्य) के हैंडल की स्थिति की परवाह किए बिना एक्ट्यूएटर बंद हो जाएगा। दूसरी कुंजी (या दो अन्य) को शून्य स्थिति में लौटाने के बाद ही एक नई शुरुआत संभव है।
बहुत बार वे एक सरलीकृत योजना (चित्र 19) के अनुसार दो और तीन स्थानों से ड्राइव नियंत्रण का उपयोग करते हैं; इसका मतलब केवल एक प्रथम स्थान (कुंजी SA1) से अधिमान्य नियंत्रण है। जब ड्राइव को दूसरे स्विच (SA2 या SA3) द्वारा नियंत्रित किया जाता है, तो पहले स्विच के हैंडल को शून्य स्थिति से स्थानांतरित करने से उस स्विच पर नियंत्रण स्थानांतरित हो जाता है।
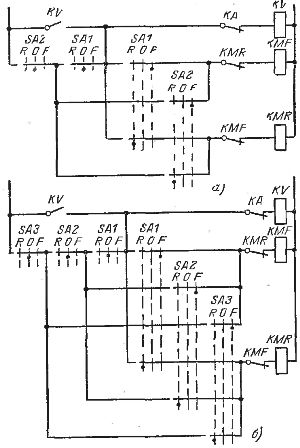
चावल। 19. प्रतिवर्ती इलेक्ट्रिक ड्राइव को नियंत्रित करने के लिए सरलीकृत योजनाएं: ए - दो स्थानों से, बी - तीन स्थानों से।