दक्षता और शक्ति पर विद्युत मोटर भार का प्रभाव
सामान्य रूप से पावर रिजर्व या इलेक्ट्रिक मोटर को कम लोड करने से दक्षता और शक्ति में गिरावट आती है। नेटवर्क से इलेक्ट्रिक मोटर द्वारा खपत सक्रिय और प्रतिक्रियाशील शक्ति के मूल्यों को निर्धारित करने के लिए कभी-कभी इन गुणांकों के वास्तविक मूल्यों को जानना आवश्यक है।
नाममात्र से कम भार पर विद्युत मोटरों की दक्षता सूत्र द्वारा निर्धारित की जा सकती है:
जहां ηnom इलेक्ट्रिक मोटर की नाममात्र दक्षता है।
β निर्धारित करने के लिए, सूत्र का उपयोग करें:

जहां Kz नाममात्र (भार कारक) के लिए वास्तविक भार का अनुपात है;
α — गुणांक के बराबर माना जाता है:
श्रृंखला उत्तेजना के साथ डीसी मोटर्स के लिए - 0.5 (कम गति के लिए) से 1 (उच्च गति के लिए);
• समानांतर उत्तेजना वाली विद्युत मोटरों के लिए - 1 (कम गति के लिए) से 2 (उच्च गति के लिए);
• अतुल्यकालिक इलेक्ट्रिक मोटर्स के लिए — 0.5 से 1 तक; क्रेन और सिंक्रोनस इलेक्ट्रिक मोटर्स के लिए - 2 तक।
मूल्य ऊर्जा घटक इंडक्शन मोटर कई कारकों पर निर्भर करता है और, सख्ती से बोलना, प्रत्येक इलेक्ट्रिक मोटर के लिए अलग होता है, यहां तक कि एक ही प्रकार का भी।
हालाँकि, डिज़ाइन स्थितियों के तहत, अपेक्षित भार के आधार पर केवल पावर फैक्टर के अनुमानित औसत मूल्यों को जानना पर्याप्त है।
सरलीकृत पाई चार्ट से, निम्नलिखित संबंध प्राप्त होता है:

पदनाम - अंजीर देखें। 1.
जहाँ tanφ1, इलेक्ट्रिक मोटर P1, kW के वास्तविक भार के अनुरूप चरण कोण की स्पर्शरेखा है; tanφnom - इलेक्ट्रिक मोटर PH0M (मोटर पासपोर्ट में निर्दिष्ट cosφnom द्वारा निर्धारित) के नाममात्र भार के अनुरूप चरण परिवर्तन कोण की स्पर्शरेखा; σ-प्रतिक्षेप क्षण का अनुपात नाममात्र (1.8-2 की संकीर्ण सीमा के भीतर है);

K3 - लोड फैक्टर।
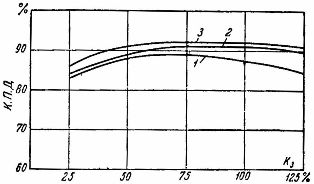
चावल। 1. लोड के आधार पर अतुल्यकालिक विभिन्न इलेक्ट्रिक मोटर्स की दक्षता घटता है।
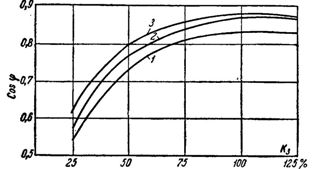
चावल। 2. लोड के आधार पर अतुल्यकालिक इलेक्ट्रिक मोटर्स के पावर फैक्टर के वक्र।
सबसे सामान्य प्रकार के अतुल्यकालिक इलेक्ट्रिक मोटर्स के भार पर η और cosφ की निर्भरता के वक्र अंजीर में दिए गए हैं। 1 और 2।