स्व-उत्तेजना द्वारा गतिशील ब्रेकिंग के मोड में संचालन के लिए एक अतुल्यकालिक इलेक्ट्रिक मोटर का चयन
 सबसे सरल नियंत्रण योजना के साथ घाव वाले रोटर के साथ अतुल्यकालिक इलेक्ट्रिक मोटर - रोटर सर्किट में प्रतिरोध को शामिल करने में बेहद कम नियंत्रण गुण होते हैं। इसलिए, बाजार में फ्रीक्वेंसी कन्वर्टर्स की उपलब्धता से पहले, स्टेप-डाउन मोड में कम गति प्राप्त करने के लिए विभिन्न योजनाओं का विकास किया गया था।
सबसे सरल नियंत्रण योजना के साथ घाव वाले रोटर के साथ अतुल्यकालिक इलेक्ट्रिक मोटर - रोटर सर्किट में प्रतिरोध को शामिल करने में बेहद कम नियंत्रण गुण होते हैं। इसलिए, बाजार में फ्रीक्वेंसी कन्वर्टर्स की उपलब्धता से पहले, स्टेप-डाउन मोड में कम गति प्राप्त करने के लिए विभिन्न योजनाओं का विकास किया गया था।
वास्तव में, उनमें से बहुत से नहीं हैं। विदेश में, एक अतिरिक्त इलेक्ट्रिक मशीन का उपयोग - मुख्य इंजन के समान शाफ्ट पर घुड़सवार एक भंवर ब्रेक - व्यापक हो गया। यह योजना आपको भार कम करते समय पर्याप्त कठोर यांत्रिक विशेषताओं को प्राप्त करने की अनुमति देती है, लेकिन इस तरह के इलेक्ट्रिक ड्राइव में बहुत कम ऊर्जा विशेषताएँ होती हैं (भंवर ब्रेक में ब्रेकिंग ऊर्जा जारी होती है)। इसके अलावा, भंवर ब्रेक की उच्च लागत होती है और यांत्रिक भाग के लेआउट को बहुत जटिल करता है।
इसलिए, 1970 के दशक के अंत में डायनमो संयंत्र में एक चरण रोटर के साथ एक अतुल्यकालिक मोटर के आधार पर उठाने वाले तंत्र में लैंडिंग गति प्राप्त करने के लिए, ई.एम. के नेतृत्व में एक डिजाइन टीम। Pevzner ने स्व-उत्साहित गतिशील ब्रेकिंग की शुरुआत की।
इस तरह के एक इलेक्ट्रिक ड्राइव का व्यापक रूप से घरेलू क्रेन (प्रकार TSD, TSDI, KSDB के पुल, गैन्ट्री और गैन्ट्री क्रेन के पैनल, टॉवर क्रेन KB-309, KB-403, KB-404, KB-405, KB - के लिए नियंत्रण पैनल) में उपयोग किया जाता है। 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P।)। इस प्रकार, हम संचालन में हजारों क्रेनों के बारे में बात कर रहे हैं।
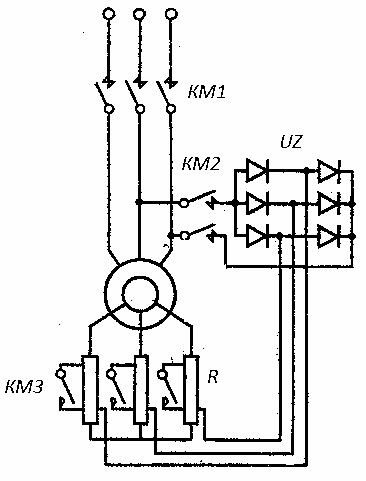
चावल। 1. स्व-उत्तेजना द्वारा गतिशील ब्रेकिंग मोड में एक अतुल्यकालिक मोटर को शामिल करने की योजना
स्व-उत्तेजना के साथ गतिशील ब्रेकिंग का सिद्धांत इस प्रकार है:
रोटर सर्किट शामिल है तीन चरण सुधारक यूजेड (चित्र 1)। इलेक्ट्रिक मोटर को संपर्ककर्ता KM1 के माध्यम से नेटवर्क से डिस्कनेक्ट कर दिया गया है। सुधारा हुआ वोल्टेज संपर्ककर्ता KM2 के माध्यम से स्टेटर वाइंडिंग से जुड़ा होता है। संपर्ककर्ता संपर्क KM3 बंद हैं। जब ब्रेक जारी किया जाता है (आरेख में नहीं दिखाया गया है), मोटर शाफ्ट गिरने वाले वजन की कार्रवाई के तहत घूमना शुरू कर देता है।
रोटर वाइंडिंग में एक EMF प्रेरित होता है, जिसके प्रभाव में रोटर-स्टेटर सर्किट में करंट प्रवाहित होने लगता है। मोटर ब्रेकिंग टॉर्क विकसित करता है, लोड को स्थिर गति से कम किया जाता है। गति मान रोटर सर्किट के प्रतिरोध मान द्वारा निर्धारित किया जाता है। प्रतिरोध जितना अधिक होगा, वंश की गति उतनी ही तेज होगी। गति बढ़ाने के लिए, संपर्ककर्ता KM3 को बंद कर दिया गया है।
स्व-उत्तेजना डायनेमिक ब्रेकिंग मोड में, इलेक्ट्रिक ड्राइव केवल ब्रेक हाइड्रोलिक पुशर और रिले-कॉन्टैक्टर उपकरण को पावर देने के लिए नेटवर्क से बिजली की खपत करता है। एक उदाहरण के रूप में, चित्र। 7 टीएसडी पैनल के साथ इलेक्ट्रिक ड्राइव की यांत्रिक विशेषताओं को दर्शाता है।
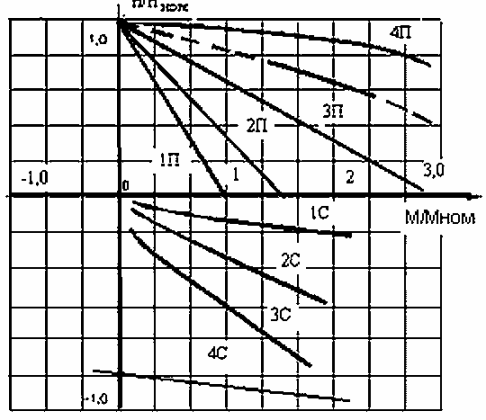
चावल। 2. TSD पैनल के साथ उठाने वाले तंत्र के इलेक्ट्रिक ड्राइव की यांत्रिक विशेषताएं
गतिशील ब्रेकिंग विशेषताओं को 1C, 2C, 3C के रूप में नामित किया गया है। यह देखा जा सकता है कि विशेषताओं में पर्याप्त कठोरता है। गति समायोजन 1: 8 की सीमा में किया जाता है, जो ज्यादातर मामलों में बड़े पैमाने पर नल के लिए पर्याप्त होता है।
विद्युत मोटर के स्व-उत्तेजना की स्थिति है:
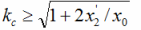
जहाँ x '2- रोटर वाइंडिंग का आगमनात्मक प्रतिरोध, ओम; хо- चुंबकीयकरण सर्किट का आगमनात्मक प्रतिरोध। ओम
जहाँ केएस - योजना का गुणांक
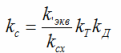
केडी - रोटर करंट को स्टेटर करंट में कमी का गुणांक; केसीएक्स - सुधार सर्किट गुणांक, तीन चरण पुल सर्किट केएक्स = 0.85 के लिए; kt स्टेटर से रोटर तक मोटर का रूपांतरण गुणांक है
गुणांक केडी स्टेटर वाइंडिंग्स की कनेक्शन योजना पर निर्भर करता है, जो 380 वी के मुख्य वोल्टेज पर घरेलू नल मोटर्स में एक स्टार से जुड़े होते हैं।
गुणांक kt परिवर्तन गुणांक पर निर्भर करता है, अर्थात। स्टेटर वोल्टेज से रोटर वोल्टेज का अनुपात, जो मोटर प्रकार पर निर्भर करता है। उदाहरण के लिए, MT और 4MT श्रृंखला के कई इलेक्ट्रिक मोटर्स के लिए, मान और संबंधित पैरामीटर सारणीबद्ध हैं। 1.
तालिका नंबर एक।
इलेक्ट्रिक मोटर टाइप पावर, kWt रोटर वोल्टेज, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31 1.31 0.197 3.73 1.05 MTN512-6 55 340 1.11 0.98 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.98 1.02
हालत кс ≥ √(1 + 2х '2/хо) MTN412-6, 4MTN225L6 प्रकार के इंजनों के लिए किया जाता है, जिसे "उत्साहित" कहा जा सकता है। ऐसे इलेक्ट्रिक मोटर्स अतिरिक्त सर्किट निर्णय किए बिना स्व-उत्तेजना मोड में प्रवेश करते हैं। हालांकि, ऐसे मोटर्स के साथ मिलकर काम करने के लिए डिज़ाइन किए गए लो-वोल्टेज पूर्ण डिवाइस (लो-वोल्टेज स्विचगियर या कंट्रोल पैनल) में, विश्वसनीय संचालन के लिए एक छोटा प्रारंभिक उत्तेजना प्रदान किया जाता है।
प्रारंभिक उत्तेजना एक स्थिर, तथाकथित पारित करके किया जाता है हाफ-वेव रेक्टिफायर से "सप्लाई करंट" का एक छोटा मूल्य (आमतौर पर मोटर के रेटेड करंट का 10% से अधिक नहीं)। उत्साहित मोटर्स के लिए, किसी भी मामले में, यह स्व-उत्तेजित गतिशील ब्रेकिंग मोड में एक विश्वसनीय संक्रमण के लिए पर्याप्त है।
इलेक्ट्रिक मोटर्स MTN512-6, 4MTN280M6, जिसके लिए स्थिति кс ≥ √(1 + 2х '2/хо) संतुष्ट नहीं है, "अप्रकाशित" हैं। इसका मतलब यह नहीं है कि ऐसी मोटरें स्व-उत्तेजना के साथ डायनेमिक ब्रेकिंग मोड में काम नहीं कर सकती हैं, लेकिन उनके लिए आवश्यक अतिरिक्त करंट का मूल्य स्टेटर के रेटेड करंट के 50% तक पहुंच जाता है।यह गैर-उत्तेजित इलेक्ट्रिक मोटरों के लिए विशेष एनकेयू (नियंत्रण पैनल) के उपयोग की आवश्यकता है। …
इलेक्ट्रिक मोटर प्रकार 4MTN280L10 кс = √(1 + 2х '2/хо) के साथ स्व-उत्तेजना की सीमा पर है और मापदंडों में कोई भी यादृच्छिक परिवर्तन स्व-उत्तेजना की स्थिति का उल्लंघन कर सकता है। इसलिए, ऐसी मोटर को गैर-उत्तेजक के रूप में भी वर्गीकृत किया जा सकता है।
इलेक्ट्रिक मोटर की आत्म-उत्तेजना की क्षमता को प्रभावित करने वाले मुख्य पैरामीटर रोटर E2nom का रेटेड वोल्टेज है। E2nom का महत्वपूर्ण मूल्य, जिस पर बड़े आपूर्ति प्रवाह के बिना स्व-उत्तेजना नहीं होती है, को 300 V के रूप में लिया जाना चाहिए।
1980 के दशक की शुरुआत में 4MT क्रेन इलेक्ट्रिक मोटर्स की एक श्रृंखला विकसित करते समय डायनेमो प्लांट और सिबेलेक्ट्रोमोटर पीओ द्वारा स्व-उत्तेजना गतिशील ब्रेकिंग मोड की इस विशेषता को ध्यान में रखा गया था।
विशेष रूप से, मोटरों को उत्तेजनीय बनाने के लिए पिछली एमटी श्रृंखला की तुलना में कुछ इलेक्ट्रिक मोटरों के लिए E2nom मूल्य कम कर दिया गया है।
उदाहरण के लिए, 4MTN225L6 इलेक्ट्रिक मोटर के लिए, टावर क्रेन के इलेक्ट्रिक ड्राइव में व्यापक रूप से उपयोग किया जाता है, E2nom को पिछली MTN512-6 श्रृंखला मोटर की तुलना में 340 से 290 V तक कम किया गया था, जिसने मोटर को आत्म-उत्तेजित कर दिया था। बाद में, OJSC "Sibelectromotor" ने समान मापदंडों के साथ इलेक्ट्रिक मोटर 4MTM225L6 का उत्पादन शुरू किया।
समय के साथ, अन्य निर्माताओं द्वारा इसी तरह के उद्देश्य के साथ इलेक्ट्रिक मोटर्स का उत्पादन किया जाने लगा।
Rzhevsky क्रेन कंस्ट्रक्शन प्लांट MKAF225L6 इलेक्ट्रिक मोटर का उत्पादन करता है, साइबेरियन इलेक्ट्रोटेक्निकल कंपनी 4MTM225L6 PND इलेक्ट्रिक मोटर का उत्पादन करती है।प्रत्येक निर्माता की तकनीकी क्षमताओं से संबंधित प्रोटोटाइप से भिन्न दिखने के बावजूद, इन सभी इलेक्ट्रिक मोटर्स में समान विद्युत पैरामीटर और स्थापना आयाम हैं और पूरी तरह से विनिमेय हैं।
इंजनों के नामों में अंतर उपयोगकर्ता को अपनी प्राथमिकताओं, मूल्य, वितरण समय आदि द्वारा निर्देशित एक या किसी अन्य निर्माता के बारे में सूचित विकल्प बनाने की अनुमति देता है। और साथ ही, पूरी तरह से सुनिश्चित रहें कि एक नल निर्माता की इलेक्ट्रिक मोटर को दूसरे निर्माता की इलेक्ट्रिक मोटर से बदलने से नल की खराबी या दुर्घटना नहीं होगी।
हालांकि, पिछले दशक में, विभिन्न निर्माताओं के इलेक्ट्रिक मोटर घरेलू बाजार में दिखाई दिए हैं, जिनमें से ब्रांड जेएससी "सिबेलेक्ट्रोमोटर" द्वारा उत्पादित "मूल" इलेक्ट्रिक मोटर के ब्रांड को बिल्कुल पुन: उत्पन्न करता है। यह माना जा सकता है कि इलेक्ट्रिक मोटर्स की उत्पत्ति हमारे देश के बड़े पूर्वी पड़ोसी से जुड़ी हुई है। उनकी कीमत पारंपरिक निर्माताओं की तुलना में थोड़ी कम है, इसलिए उद्यमों की आपूर्ति से उनमें रुचि समझ में आती है।
इस प्रकार, एक निर्मित क्रेन पर स्थापना के लिए एक इलेक्ट्रिक मोटर का आदेश देकर या क्रेन पर क्षतिग्रस्त इलेक्ट्रिक मोटर को एक काम करने वाले के साथ बदलकर, आप एक अज्ञात निर्माता की इलेक्ट्रिक मोटर प्राप्त कर सकते हैं, जो प्रोटोटाइप इलेक्ट्रिक मोटर से अलग E2nom है।
स्थिति कुछ हद तक 90 के दशक की याद दिलाती है, जब एक ही नाम के कई पॉप समूहों ने एक ही समय में देश का दौरा किया था।
आइए हम एक बार फिर से याद करें कि अनुपात E2nom / I2nom एक घाव रोटर के साथ मोटर का सबसे महत्वपूर्ण पैरामीटर है, जो प्रतिरोधों को शुरू करने, रिले-संपर्क उपकरण की पसंद को प्रभावित करता है और जैसा कि ऊपर उल्लेख किया गया है, स्व-उत्तेजना की स्थिति पर विद्युत मोटर।
अक्सर, हालांकि, क्लोन किए गए इंजनों के नेमप्लेट पर कोई रोटर डेटा नहीं होता है। यहाँ एक उदाहरण है:
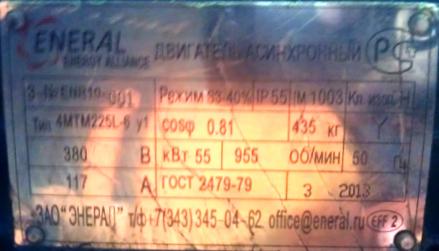
चावल। 3. रोटर क्रेन अतुल्यकालिक मोटर नेमप्लेट
वैसे, इस इलेक्ट्रिक मोटर का "सही" मान E2nom था, केवल अब इसे अनुभवजन्य रूप से निर्धारित किया जाना था।
4MTM225L6 इलेक्ट्रिक मोटर के लिए अन्य निर्माताओं के कैटलॉग में, मूल्य E2nom = 340 V इंगित किया गया है, अर्थात। उत्साहित मोटर एक अस्पष्टीकृत हो गई। स्व-उत्तेजना के साथ गतिशील ब्रेकिंग के साथ इलेक्ट्रिक ड्राइव के हिस्से के रूप में ऐसी इलेक्ट्रिक मोटर का उपयोग करने का परिणाम रोटर और स्टेटर वाइंडिंग्स के यांत्रिक विनाश के साथ इलेक्ट्रिक मोटर के भार और पृथक्करण में गिरावट है।
यह ठीक यही तस्वीर है जिसे लेखक ने हाल ही में सबसे पुराने रूसी मशीन-निर्माण उद्यमों में से एक में देखा, जहां E2n = 340 V के साथ 4MTM225L6 प्रकार के क्लोन इलेक्ट्रिक मोटर के साथ एक नया पुल क्रेन दिया गया था। केवल भाग्य से, लोगों ने नहीं किया कष्ट सहना। इसके अलावा, क्रेन का मालिक चकमा देने के बाद इंजन को तीन (!) बार पुनर्स्थापित करता है।
क्लोन इलेक्ट्रिक मोटर्स का एक अन्य निर्माता, जाहिरा तौर पर बार-बार इसी तरह की दुर्घटनाओं का सामना कर रहा है, अब एक ही ब्रांड (!) के तहत दो इलेक्ट्रिक मोटर्स का उत्पादन करता है। एक E2nom = 340 V के साथ, दूसरा E2nom = 264 V के साथ कैटलॉग में एक नोट के साथ दिया गया है: "टाइप KB टैप्स के लिए", अर्थात। टॉवर क्रेन।
इस तरह की मोटर वास्तव में टॉवर क्रेन पर सबसे अधिक उपयोग की जाती है, लेकिन यह ब्रिज क्रेन पर भी स्थापित होती है। तो आप आपूर्तिकर्ता और ग्राहक के बीच संवाद सुन सकते हैं: “आपको किस क्रेन के लिए मोटर की आवश्यकता है? फर्श के लिए। फिर इसे लें (E2nom = 340 V)। » और इलेक्ट्रिक होइस्ट के ड्राइव में सेल्फ-एक्साइटेड डायनेमिक ब्रेकिंग के साथ एक कंट्रोल पैनल है। परिणाम ऊपर वर्णित है।
साथ ही, कोई भी यह नहीं कह रहा है कि ये इलेक्ट्रिक मोटर दोषपूर्ण या अविश्वसनीय हैं और इन्हें क्रेन पर इस्तेमाल नहीं किया जा सकता है। बाजार पर जितने अधिक विकल्प होंगे, उतना अच्छा होगा। जैसा कि वे कहते हैं, अधिक अच्छे और अलग इंजन हैं। यह सिर्फ इतना है कि उनका ब्रांड उपभोक्ता को गुमराह करता है, जिसके खतरनाक परिणाम हो सकते हैं।
प्रोटोटाइप के अलावा रोटर मापदंडों के साथ एक इलेक्ट्रिक मोटर का उपयोग करने के लिए, आपको यह करना होगा:
-
रोटर सर्किट खुला होने पर E2nom को मापें और स्टेटर वाइंडिंग ग्रिड से जुड़ा हो;
-
E2nom माप के आधार पर गिट्टी प्रतिरोधों की गणना, चयन और क्रम;
-
सूची से गैर-उत्तेजना इलेक्ट्रिक मोटर्स के लिए एक नियंत्रण कक्ष चुनें और इसे ऑर्डर करें।
या आप किसी इंजन को ऑर्डर करने से पहले E2nom के मूल्य के बारे में पूछ सकते हैं जो इसकी कीमत के साथ आकर्षित करता है और अनुबंध में इस पर विशेष रूप से सहमत है। हालाँकि, यह आदेशित मोटर के इनपुट नियंत्रण के दौरान E2nom के माप को नहीं रोकता है।
उपरोक्त को सारांशित करते हुए, हम निम्नलिखित निष्कर्ष निकाल सकते हैं:
-
चरण रोटर इलेक्ट्रिक मोटर्स के आधार पर घरेलू नल के इलेक्ट्रिक ड्राइव में, स्व-उत्तेजित गतिशील ब्रेकिंग का व्यापक रूप से उपयोग किया जाता है। इस तरह के हजारों इलेक्ट्रिक ड्राइव काम कर रहे हैं। वे अभी भी जारी किए जा रहे हैं।
-
स्व-उत्साहित गतिशील ब्रेकिंग मोड में काम करने के लिए, इलेक्ट्रिक मोटर में एक निश्चित E2nom / I2nom अनुपात होना चाहिए।
-
घाव रोटर के साथ एक इलेक्ट्रिक मोटर के स्व-उत्तेजना के लिए मुख्य स्थिति E2nom ≤ 300 V का मान है।
-
उत्तेजित विद्युत मोटरों के लिए डिज़ाइन किए गए नियंत्रण पैनलों के साथ E2nom> 300 V के साथ विद्युत मोटरों का उपयोग लोड को विद्युत मोटर को गिराने और नष्ट करने का कारण बन सकता है।