फ्रीक्वेंसी कन्वर्टर - प्रकार, संचालन का सिद्धांत, कनेक्शन योजनाएं
 किसी भी इलेक्ट्रिक मोटर का रोटर स्टेटर वाइंडिंग के अंदर एक घूर्णन विद्युत चुम्बकीय क्षेत्र के कारण होने वाली शक्तियों से संचालित होता है। इसकी गति आमतौर पर पावर ग्रिड की औद्योगिक आवृत्ति द्वारा निर्धारित की जाती है।
किसी भी इलेक्ट्रिक मोटर का रोटर स्टेटर वाइंडिंग के अंदर एक घूर्णन विद्युत चुम्बकीय क्षेत्र के कारण होने वाली शक्तियों से संचालित होता है। इसकी गति आमतौर पर पावर ग्रिड की औद्योगिक आवृत्ति द्वारा निर्धारित की जाती है।
इसका 50 हर्ट्ज़ का मानक मान एक सेकंड में पचास दोलन अवधियों को दर्शाता है। एक मिनट में इनकी संख्या 60 गुना बढ़ जाती है और 50×60 = 3000 चक्कर हो जाते हैं। लागू विद्युत चुम्बकीय क्षेत्र के प्रभाव में रोटर समान संख्या में घूमता है।
यदि आप स्टेटर पर लागू मुख्य आवृत्ति के मान को बदलते हैं, तो आप रोटर के घूर्णन की गति और उससे जुड़े ड्राइव को समायोजित कर सकते हैं। यह सिद्धांत विद्युत मोटरों के नियंत्रण का आधार है।
आवृत्ति कन्वर्टर्स के प्रकार
डिज़ाइन द्वारा, आवृत्ति कन्वर्टर्स हैं:
1. प्रेरण प्रकार;
2. इलेक्ट्रॉनिक।
निर्मित अतुल्यकालिक मोटर्स एक चरण रोटर के साथ योजना के अनुसार और जनरेटर मोड में शुरू, पहले प्रकार के प्रतिनिधि हैं। ऑपरेशन के दौरान, उनके पास कम दक्षता होती है और उन्हें कम दक्षता की विशेषता होती है।इसलिए, उन्हें उत्पादन में व्यापक आवेदन नहीं मिला है और बहुत ही कम उपयोग किया जाता है।
इलेक्ट्रॉनिक आवृत्ति रूपांतरण विधि अतुल्यकालिक और तुल्यकालिक मशीनों दोनों के सुचारू गति विनियमन की अनुमति देती है। इस मामले में, दो नियंत्रण सिद्धांतों में से एक को लागू किया जा सकता है:
1. आवृत्ति (वी / एफ) पर घूर्णन गति की निर्भरता की पूर्व निर्धारित विशेषता के अनुसार;
2. वेक्टर नियंत्रण विधि।
पहली विधि सबसे सरल और कम सटीक है, और दूसरी का उपयोग महत्वपूर्ण औद्योगिक उपकरणों की घूर्णी गति को ठीक से नियंत्रित करने के लिए किया जाता है।
आवृत्ति रूपांतरण वेक्टर नियंत्रण की विशेषताएं
इस पद्धति के बीच का अंतर बातचीत है, रोटर क्षेत्र की आवृत्ति के साथ घूर्णन चुंबकीय प्रवाह के «अंतरिक्ष वेक्टर» पर कनवर्टर नियंत्रण उपकरण का प्रभाव।
कन्वर्टर्स के लिए इस सिद्धांत पर काम करने के लिए एल्गोरिदम दो तरह से बनाए जाते हैं:
1. सेंसर रहित नियंत्रण;
2. प्रवाह नियमन।
पहली विधि अनुक्रमों के प्रत्यावर्तन पर एक निश्चित निर्भरता निर्धारित करने पर आधारित है पल्स चौड़ाई मॉडुलन (PWM) प्रीसेट एल्गोरिदम के लिए इन्वर्टर। इस मामले में, कनवर्टर आउटपुट वोल्टेज के आयाम और आवृत्ति को स्लिप करंट और लोड द्वारा नियंत्रित किया जाता है, लेकिन रोटर स्पीड फीडबैक का उपयोग किए बिना।
आवृत्ति कनवर्टर के साथ समानांतर में जुड़े कई इलेक्ट्रिक मोटरों को नियंत्रित करते समय इस विधि का उपयोग किया जाता है।प्रवाह नियंत्रण में सक्रिय और प्रतिक्रियाशील घटकों में उनके अपघटन के साथ मोटर के अंदर ऑपरेटिंग धाराओं की निगरानी करना और आउटपुट वोल्टेज वैक्टर के लिए आयाम, आवृत्ति और कोण सेट करने के लिए कनवर्टर ऑपरेशन में समायोजन करना शामिल है।
इससे इंजन की सटीकता में सुधार होता है और इसके समायोजन की सीमा बढ़ जाती है। प्रवाह नियंत्रण का उपयोग उच्च गतिशील भार, जैसे क्रेन होइस्ट या औद्योगिक घुमावदार मशीनों के साथ कम गति पर चलने वाले ड्राइव की क्षमताओं को बढ़ाता है।
वेक्टर तकनीक का उपयोग गतिशील टोक़ नियंत्रण को कार्यान्वित करने की अनुमति देता है तीन चरण अतुल्यकालिक मोटर्स.
बराबर सर्किट
प्रेरण मोटर के एक बुनियादी सरलीकृत विद्युत सर्किट को निम्नानुसार दर्शाया जा सकता है।
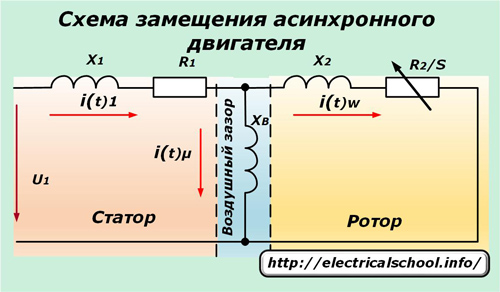
स्टेटर वाइंडिंग पर एक वोल्टेज u1 लगाया जाता है, जिसमें एक सक्रिय प्रतिरोध R1 और एक आगमनात्मक प्रतिरोध X1 होता है। यह, हवा के अंतराल Xv के प्रतिरोध पर काबू पाने, रोटर वाइंडिंग में तब्दील हो जाता है, जिससे इसमें एक करंट पैदा होता है जो इसके प्रतिरोध को खत्म कर देता है।
वेक्टर सर्किट के समतुल्य सर्किट
इसका निर्माण प्रेरण मोटर में होने वाली प्रक्रियाओं को समझने में मदद करता है।

स्टेटर करंट की ऊर्जा को दो भागों में बांटा गया है:
-
iµ — प्रवाह-निर्माण विभाजन;
-
iw - क्षण उत्पन्न करने वाला घटक।
इस स्थिति में, रोटर में स्लिप-निर्भर सक्रिय प्रतिरोध R2 / s होता है।
सेंसर रहित नियंत्रण के लिए, निम्नलिखित को मापा जाता है:
-
वोल्टेज यू 1;
-
वर्तमान i1।
उनके मूल्यों के अनुसार, वे गणना करते हैं:
-
iµ — प्रवाह घटक जिससे प्रवाह बनता है;
-
आईडब्ल्यू - मूल्य पैदा करने वाला टोक़।
गणना एल्गोरिथ्म में अब वर्तमान नियामकों के साथ एक प्रेरण मोटर का एक इलेक्ट्रॉनिक समतुल्य सर्किट शामिल है, जो विद्युत चुम्बकीय क्षेत्र की संतृप्ति की स्थिति और स्टील में चुंबकीय ऊर्जा के नुकसान को ध्यान में रखता है।
वर्तमान वैक्टर के दोनों घटक, कोण और आयाम में भिन्न, रोटर समन्वय प्रणाली के साथ एक साथ घूमते हैं और एक स्थिर स्टेटर ओरिएंटेशन सिस्टम बन जाते हैं।
इस सिद्धांत के अनुसार, आवृत्ति कनवर्टर के पैरामीटर प्रेरण मोटर के भार के अनुसार समायोजित किए जाते हैं।
आवृत्ति कनवर्टर के संचालन का सिद्धांत
यह उपकरण, जिसे इन्वर्टर भी कहा जाता है, मुख्य बिजली आपूर्ति के तरंग में दोहरे परिवर्तन पर आधारित है।
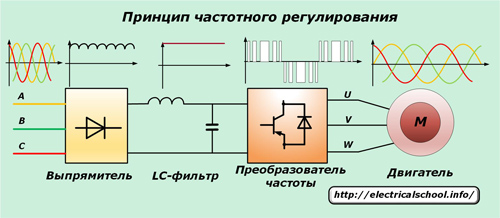
प्रारंभ में, औद्योगिक वोल्टेज शक्तिशाली डायोड के साथ एक रेक्टीफायर को खिलाया जाता है जो साइनसॉइडल हार्मोनिक्स को हटा देता है लेकिन सिग्नल रिपल्स छोड़ देता है। उन्हें हटाने के लिए, एक अधिष्ठापन (एलसी-फ़िल्टर) वाला एक कैपेसिटर बैंक प्रदान किया जाता है, जो संशोधित वोल्टेज को एक स्थिर, चिकना आकार प्रदान करता है।
संकेत तब आवृत्ति कनवर्टर के इनपुट पर जाता है, जो छह का तीन-चरण ब्रिज सर्किट है विद्युत ट्रांजिस्टर रिवर्स पोलरिटी वोल्टेज प्रोटेक्शन डायोड के साथ IGBT या MOSFET सीरीज़। इन उद्देश्यों के लिए पहले इस्तेमाल किए गए थायरिस्टर्स में पर्याप्त गति नहीं होती है और बड़ी गड़बड़ी के साथ काम करते हैं।
मोटर के "ब्रेक" मोड को चालू करने के लिए, एक शक्तिशाली रोकनेवाला के साथ एक नियंत्रित ट्रांजिस्टर जो ऊर्जा को नष्ट करता है, सर्किट में स्थापित किया जा सकता है। यह तकनीक फिल्टर कैपेसिटर को ओवरचार्जिंग और क्षति से बचाने के लिए मोटर द्वारा उत्पन्न वोल्टेज को हटाने की अनुमति देती है।
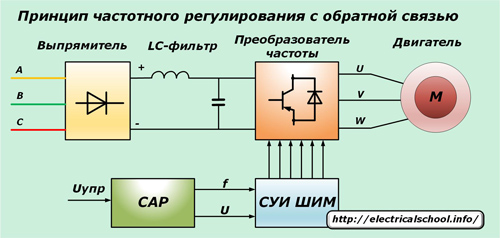
कनवर्टर की वेक्टर फ्रीक्वेंसी कंट्रोल विधि आपको सर्किट बनाने की अनुमति देती है जो एसीएस सिस्टम से सिग्नल का स्वत: नियंत्रण करती है। इसके लिए एक प्रबंधन प्रणाली का उपयोग किया जाता है:
1. आयाम;
2. पीडब्लूएम (पल्स चौड़ाई सिमुलेशन)।
आयाम नियंत्रण विधि इनपुट वोल्टेज को बदलने पर आधारित है, और PWM एक निरंतर इनपुट वोल्टेज पर पावर ट्रांजिस्टर को स्विच करने के लिए एल्गोरिथम पर आधारित है।
पीडब्लूएम विनियमन के साथ, सिग्नल मॉड्यूलेशन की अवधि बनाई जाती है जब स्टेटर वाइंडिंग रेक्टिफायर के सकारात्मक और नकारात्मक टर्मिनलों से सख्त क्रम में जुड़ा होता है।
चूँकि जेनरेटर की क्लॉक फ्रीक्वेंसी काफी अधिक होती है, तो इलेक्ट्रिक मोटर की वाइंडिंग में, जिसमें इंडक्टिव रेजिस्टेंस होता है, उन्हें एक सामान्य साइन वेव में स्मूथ किया जाता है।
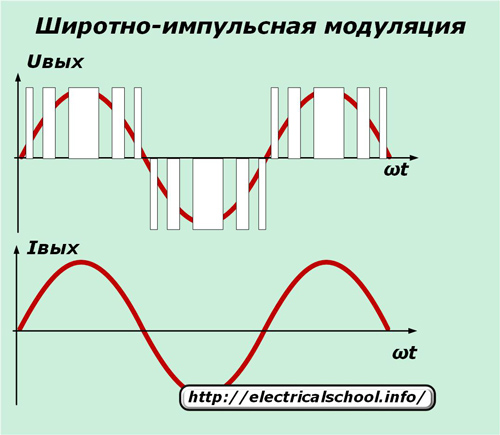
PWM नियंत्रण विधियाँ ऊर्जा हानि के उन्मूलन को अधिकतम करती हैं और आवृत्ति और आयाम के एक साथ नियंत्रण के कारण उच्च रूपांतरण दक्षता प्रदान करती हैं। वे जीटीओ श्रृंखला के पावर-लॉक्ड थाइरिस्टर नियंत्रण प्रौद्योगिकियों या इंसुलेटेड-गेट आईजीबीटी ट्रांजिस्टर के द्विध्रुवी ब्रांडों के विकास के कारण उपलब्ध हो गए हैं।
तीन-चरण मोटर को नियंत्रित करने के लिए उनके शामिल होने के सिद्धांत फोटो में दिखाए गए हैं।
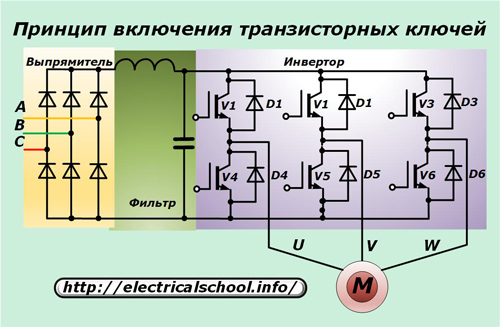
छह आईजीबीटी में से प्रत्येक एंटीपैरलल सर्किट में अपने स्वयं के रिवर्स करंट डायोड से जुड़ा है। इस स्थिति में, इंडक्शन मोटर का सक्रिय करंट प्रत्येक ट्रांजिस्टर के पावर सर्किट से होकर गुजरता है, और इसके प्रतिक्रियाशील घटक को डायोड के माध्यम से निर्देशित किया जाता है।
इन्वर्टर और मोटर के संचालन पर बाहरी विद्युत शोर के प्रभाव को समाप्त करने के लिए, आवृत्ति कनवर्टर के सर्किट में शामिल हो सकते हैं शोर में कमी फिल्टरपरिसमापन:
-
रेडियो हस्तक्षेप;
-
ऑपरेटिंग उपकरण के कारण विद्युत निर्वहन।
इन्हें कंट्रोलर द्वारा सिग्नल किया जाता है और झटके को कम करने के लिए मोटर और इन्वर्टर आउटपुट टर्मिनलों के बीच शील्ड वायरिंग का उपयोग किया जाता है।
अतुल्यकालिक मोटर्स के संचालन की सटीकता में सुधार करने के लिए, आवृत्ति कन्वर्टर्स के नियंत्रण सर्किट में शामिल हैं:
-
उन्नत इंटरफ़ेस क्षमताओं के साथ संचार इनपुट;
-
अंतर्निहित नियंत्रक;
-
मेमोरी कार्ड;
-
सॉफ़्टवेयर;
-
मुख्य आउटपुट पैरामीटर दिखाते हुए सूचनात्मक एलईडी डिस्प्ले;
-
ब्रेक चॉपर और बिल्ट-इन EMC फ़िल्टर;
-
बढ़े हुए संसाधन के प्रशंसकों के साथ उड़ाने पर आधारित सर्किट कूलिंग सिस्टम;
-
प्रत्यक्ष धारा द्वारा इंजन को गर्म करने का कार्य और कुछ अन्य संभावनाएँ।
ऑपरेशनल वायरिंग आरेख
फ़्रीक्वेंसी कन्वर्टर्स को सिंगल-फ़ेज़ या थ्री-फ़ेज़ नेटवर्क के साथ काम करने के लिए डिज़ाइन किया गया है। हालांकि, अगर 220 वोल्ट के वोल्टेज के साथ प्रत्यक्ष प्रवाह के औद्योगिक स्रोत हैं, तो इनवर्टर को उनसे संचालित किया जा सकता है।

तीन-चरण मॉडल 380 वोल्ट के मुख्य वोल्टेज के लिए डिज़ाइन किए गए हैं और इसे इलेक्ट्रिक मोटर को खिलाते हैं। एकल-चरण इनवर्टर 220 वोल्ट द्वारा संचालित होते हैं और समय के साथ वितरित तीन चरणों का उत्पादन करते हैं।
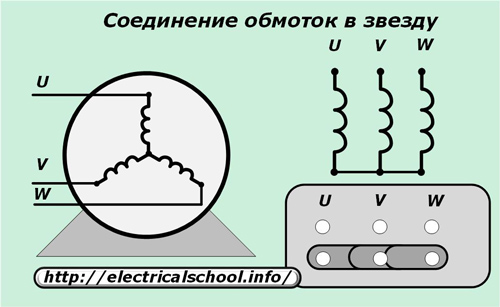
मोटर के लिए आवृत्ति कनवर्टर की कनेक्शन योजना योजनाओं के अनुसार की जा सकती है:
-
सितारे;
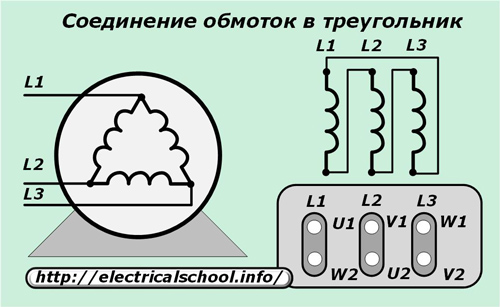
-
त्रिकोण।
380 वोल्ट के तीन-चरण नेटवर्क द्वारा संचालित कनवर्टर के लिए मोटर की वाइंडिंग को "स्टार" में इकट्ठा किया जाता है।
"डेल्टा" योजना के अनुसार, मोटर वाइंडिंग्स को तब इकट्ठा किया जाता है जब पावर कन्वर्टर एकल-चरण 220-वोल्ट नेटवर्क से जुड़ा होता है।
इलेक्ट्रिक मोटर को फ़्रीक्वेंसी कन्वर्टर से जोड़ने की विधि चुनते समय, आपको उस पावर अनुपात पर ध्यान देने की आवश्यकता होती है, जो इन्वर्टर की क्षमताओं के साथ धीमी, लोडेड स्टार्ट सहित सभी मोड में एक रनिंग मोटर बना सकता है।
फ़्रीक्वेंसी कन्वर्टर को लगातार ओवरलोड करना असंभव है, और इसकी आउटपुट पावर का एक छोटा रिजर्व इसके दीर्घकालिक और परेशानी से मुक्त संचालन को सुनिश्चित करेगा।