ऑपरेशन का सिद्धांत और इलेक्ट्रिक मोटर का उपकरण
किसी भी इलेक्ट्रिक मोटर को उस पर लागू बिजली की खपत के कारण यांत्रिक कार्य करने के लिए डिज़ाइन किया गया है, जिसे आमतौर पर रोटरी गति में परिवर्तित किया जाता है। हालांकि प्रौद्योगिकी में ऐसे मॉडल हैं जो तुरंत काम करने वाले निकाय के एक अनुवाद संबंधी आंदोलन का निर्माण करते हैं। इन्हें रैखिक मोटर कहा जाता है।
औद्योगिक प्रतिष्ठानों में, इलेक्ट्रिक मोटर्स तकनीकी उत्पादन प्रक्रिया में शामिल विभिन्न धातु काटने वाली मशीनों और यांत्रिक उपकरणों को चलाते हैं।
घरेलू उपकरणों के अंदर, इलेक्ट्रिक मोटर वाशिंग मशीन, वैक्यूम क्लीनर, कंप्यूटर, हेयर ड्रायर, बच्चों के खिलौने, घड़ियां और कई अन्य डिवाइस चलाते हैं।

बुनियादी भौतिक प्रक्रियाएं और कार्रवाई का सिद्धांत
अंदर जाते समय चुंबकीय क्षेत्र विद्युत आवेश, जिन्हें विद्युत धारा कहा जाता है, में हमेशा एक यांत्रिक बल होता है जो चुंबकीय क्षेत्र रेखाओं के उन्मुखीकरण के लंबवत विमान में अपनी दिशा को विक्षेपित करता है।जब कोई विद्युत धारा किसी धातु के तार या उससे बनी कुंडली से होकर गुजरती है, तो यह बल प्रत्येक धारावाही तार और संपूर्ण कुंडली को गतिमान/घूर्णन करता है।
नीचे दी गई तस्वीर एक धातु के फ्रेम को दिखाती है जिसमें करंट प्रवाहित होता है। उस पर लगाया गया एक चुंबकीय क्षेत्र फ्रेम की प्रत्येक शाखा के लिए एक बल F बनाता है, जो एक घूर्णी गति बनाता है।

विद्युत और चुंबकीय ऊर्जा की परस्पर क्रिया की यह संपत्ति, एक बंद प्रवाहकीय लूप में इलेक्ट्रोमोटिव बल के निर्माण के आधार पर, प्रत्येक विद्युत मोटर पर लागू होती है। इसके डिजाइन में शामिल हैं:
-
एक कुंडल जिसके माध्यम से एक विद्युत प्रवाह प्रवाहित होता है। घर्षण बलों के प्रतिरोध को कम करने के लिए इसे एक विशेष एंकर कोर पर रखा गया है और रोटरी बियरिंग्स में तय किया गया है। इस डिज़ाइन को रोटर कहा जाता है;
-
स्टेटर, जो एक चुंबकीय क्षेत्र बनाता है, जो बल की अपनी रेखाओं के साथ रोटर वाइंडिंग के घुमावों के साथ गुजरने वाले विद्युत आवेशों में प्रवेश करता है;
-
स्टेटर रखने के लिए आवास। शरीर के अंदर, विशेष सीटें बनाई जाती हैं, जिसके अंदर रोटर बियरिंग के बाहरी पिंजरे लगे होते हैं।
सरलतम इलेक्ट्रिक मोटर के सरलीकृत डिजाइन को निम्न रूप की तस्वीर द्वारा दर्शाया जा सकता है।

जब रोटर घूमता है, तो एक टोक़ उत्पन्न होता है, जिसकी शक्ति डिवाइस के सामान्य डिजाइन, लागू विद्युत ऊर्जा की मात्रा और रूपांतरण के दौरान इसके नुकसान पर निर्भर करती है।
मोटर की अधिकतम संभव टोक़ शक्ति का परिमाण हमेशा उस पर लागू विद्युत ऊर्जा से कम होता है। यह दक्षता मूल्य की विशेषता है।
इलेक्ट्रिक मोटर्स के प्रकार
कॉइल के माध्यम से प्रवाहित होने वाले करंट के प्रकार के अनुसार, उन्हें DC या AC मोटर्स में विभाजित किया जाता है।इन दो समूहों में से प्रत्येक में विभिन्न तकनीकी प्रक्रियाओं का उपयोग करके बड़ी संख्या में संशोधन होते हैं।
डीसी मोटर्स
उनके पास स्थिर स्थिर द्वारा निर्मित एक स्टेटर चुंबकीय क्षेत्र है स्थायी मैग्नेट या उत्तेजना कॉइल के साथ विशेष विद्युत चुम्बक। आर्मेचर कॉइल को शाफ्ट में मजबूती से लगाया जाता है, जो बियरिंग्स में तय होता है और अपनी धुरी के चारों ओर स्वतंत्र रूप से घूम सकता है।
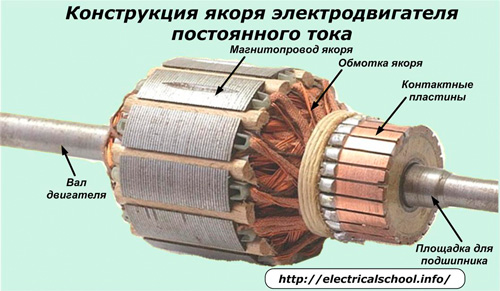
ऐसे इंजन की मूल संरचना को चित्र में दिखाया गया है।

फेरोमैग्नेटिक सामग्री से बने आर्मेचर के कोर पर, दो श्रृंखला-जुड़े भागों से मिलकर एक कॉइल होता है, जो एक छोर पर संवाहक संग्राहक प्लेटों से जुड़ा होता है और दूसरे पर एक दूसरे से जुड़ा होता है। दो ग्रेफाइट ब्रश आर्मेचर के बिल्कुल विपरीत सिरों पर स्थित होते हैं और संग्राहक प्लेटों के संपर्क पैड के खिलाफ दबाए जाते हैं।
एक सकारात्मक डीसी स्रोत क्षमता निचले पैटर्न ब्रश पर और एक नकारात्मक क्षमता ऊपरी पर लागू होती है। कॉइल के माध्यम से प्रवाहित होने वाली धारा की दिशा को धराशायी लाल तीर द्वारा दिखाया गया है।
करंट के कारण चुंबकीय क्षेत्र में आर्मेचर के निचले बाएं हिस्से में एक उत्तरी ध्रुव और आर्मेचर के ऊपरी दाएं हिस्से में एक दक्षिणी ध्रुव होता है (जिंबल नियम)। इसके परिणामस्वरूप रोटर के खंभे एक ही नाम के स्थिर लोगों से प्रतिकर्षण और स्टेटर के विपरीत ध्रुवों के प्रति आकर्षित होते हैं। लागू बल के परिणामस्वरूप, एक घूर्णी गति होती है, जिसकी दिशा एक भूरे रंग के तीर द्वारा इंगित की जाती है।
जड़ता द्वारा आर्मेचर के आगे घुमाव के साथ, ध्रुवों को अन्य संग्राहक प्लेटों में स्थानांतरित कर दिया जाता है। उनमें धारा की दिशा उलटी होती है। रोटर आगे भी घूमता रहता है।
ऐसे संग्राहक उपकरण के सरल डिजाइन से विद्युत ऊर्जा का बड़ा नुकसान होता है।ऐसी मोटरें बच्चों के लिए साधारण डिजाइन के उपकरणों या खिलौनों में काम करती हैं।
उत्पादन प्रक्रिया में शामिल प्रत्यक्ष विद्युत मोटरों में एक अधिक जटिल डिजाइन है:
-
कुंडल दो में नहीं, बल्कि कई भागों में विभाजित है;
-
कॉइल का प्रत्येक भाग अपने स्वयं के पोल पर चढ़ा हुआ है;
-
कलेक्टर डिवाइस को वाइंडिंग्स की संख्या के अनुसार एक निश्चित संख्या में संपर्क पैड के साथ बनाया जाता है।
नतीजतन, प्रत्येक ध्रुव का संपर्क प्लेटों के माध्यम से ब्रश और वर्तमान स्रोत के माध्यम से एक चिकनी कनेक्शन बनाया जाता है और ऊर्जा हानि कम हो जाती है।
ऐसे एंकर का उपकरण फोटो में दिखाया गया है।
डीसी मोटर्स में, रोटर के घूमने की दिशा उलटी हो सकती है। ऐसा करने के लिए, स्रोत पर ध्रुवीयता को बदलकर कॉइल में करंट की गति को विपरीत में बदलने के लिए पर्याप्त है।
एसी मोटर्स
वे पिछले डिज़ाइनों से भिन्न होते हैं जिसमें उनके कॉइल में बहने वाली विद्युत धारा का वर्णन किया जाता है साइनसोइडल हार्मोनिक कानूनसमय-समय पर इसकी दिशा (संकेत) बदलना। उन्हें बिजली देने के लिए, वैकल्पिक संकेतों के साथ जनरेटर से वोल्टेज की आपूर्ति की जाती है।
ऐसी मोटरों का स्टेटर चुंबकीय सर्किट द्वारा किया जाता है। यह खांचे के साथ फेरोमैग्नेटिक प्लेटों से बना होता है जिसमें कॉइल के घुमावों को एक फ्रेम (कॉइल) कॉन्फ़िगरेशन के साथ रखा जाता है।

तुल्यकालिक इलेक्ट्रिक मोटर्स
नीचे दी गई तस्वीर रोटर और स्टेटर के विद्युत चुम्बकीय क्षेत्रों के तुल्यकालिक रोटेशन के साथ एकल-चरण एसी मोटर के संचालन के सिद्धांत को दिखाती है।

व्यास के विपरीत सिरों पर स्टेटर के चुंबकीय सर्किट के खांचे में, घुमावदार तारों को रखा जाता है, योजनाबद्ध रूप से एक फ्रेम के रूप में दिखाया जाता है जिसके माध्यम से एक प्रत्यावर्ती धारा प्रवाहित होती है।
आइए हम उस समय के मामले पर विचार करें जो इसकी आधी-लहर के सकारात्मक भाग के पारित होने के अनुरूप है।
असर कोशिकाओं में, एक अंतर्निहित स्थायी चुंबक वाला रोटर स्वतंत्र रूप से घूमता है, जिसमें ध्रुव के उत्तरी «एन मुंह» और दक्षिणी «एस मुंह» स्पष्ट रूप से परिभाषित होते हैं। जब स्टेटर वाइंडिंग के माध्यम से करंट का एक पॉजिटिव हाफ-वेव प्रवाहित होता है, तो इसमें ध्रुवों "S st" और "N st" के साथ एक चुंबकीय क्षेत्र बनता है।
रोटर और स्टेटर के चुंबकीय क्षेत्र (ध्रुवों को पीछे हटाने और ध्रुवों को आकर्षित करने के विपरीत) के बीच परस्पर क्रिया बल उत्पन्न होते हैं, जो मोटर आर्मेचर को किसी भी स्थिति से चरम पर मोड़ते हैं जब विपरीत ध्रुव एक दूसरे के जितना संभव हो उतना करीब स्थित होते हैं एक और।
यदि हम एक ही मामले पर विचार करते हैं, लेकिन उस समय के लिए जब विपरीत - वर्तमान की एक नकारात्मक अर्ध-लहर फ्रेम तार से होकर गुजरती है, तो आर्मेचर का घुमाव विपरीत दिशा में होगा।
स्टेटर में रोटर की निरंतर गति सुनिश्चित करने के लिए, एक वाइंडिंग फ्रेम नहीं बनाया गया है, लेकिन उनमें से एक निश्चित संख्या है, यह देखते हुए कि उनमें से प्रत्येक एक अलग वर्तमान स्रोत द्वारा संचालित है।
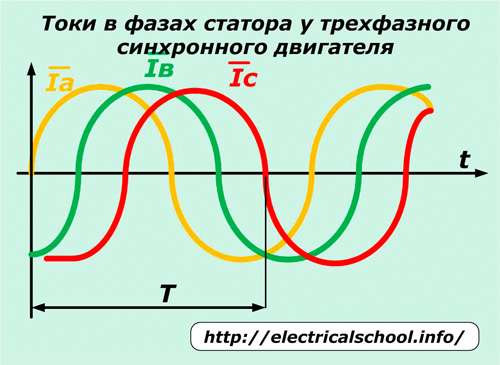
सिंक्रोनस रोटेशन के साथ तीन-चरण एसी मोटर का कार्य सिद्धांत, रोटर और स्टेटर के विद्युत चुम्बकीय क्षेत्र निम्न चित्र में दिखाए गए हैं।

इस डिजाइन में, स्टेटर मैग्नेटिक सर्किट के अंदर तीन कॉइल A, B और C लगे होते हैं, जो एक दूसरे से 120 डिग्री के कोण से ऑफसेट होते हैं। कुंडल A को पीले, B को हरा और C को लाल रंग से चिह्नित किया गया है। प्रत्येक कॉइल को पिछले मामले की तरह ही फ्रेम के साथ बनाया गया है।
तस्वीर में, किसी भी स्थिति में, आगे या पीछे की दिशा में केवल एक कॉइल से करंट प्रवाहित होता है, जिसे «+» और «-» संकेतों द्वारा दर्शाया जाता है।
जब सकारात्मक आधा तरंग आगे की दिशा में चरण ए से गुजरती है, तो रोटर क्षेत्र की धुरी एक क्षैतिज स्थिति लेती है, क्योंकि इस विमान में स्टेटर के चुंबकीय ध्रुव बनते हैं और जंगम आर्मेचर को आकर्षित करते हैं। रोटर के विपरीत ध्रुव स्टेटर के ध्रुवों के पास जाते हैं।
जब धनात्मक आधी तरंग चरण C में जाती है, तो आर्मेचर 60 डिग्री दक्षिणावर्त घूमेगा। एक बार चरण बी पर करंट लगाने के बाद, एक समान आर्मेचर रोटेशन होगा। अगली वाइंडिंग के अगले चरण में प्रत्येक बाद का प्रवाह रोटर को घुमाएगा।
यदि प्रत्येक वाइंडिंग पर 120 डिग्री के कोण से शिफ्ट किए गए तीन-चरण के मेन वोल्टेज को लागू किया जाता है, तो उनमें प्रत्यावर्ती धाराएँ प्रसारित होंगी, जो आर्मेचर को घुमाएगी और लागू विद्युत चुम्बकीय क्षेत्र के साथ इसके तुल्यकालिक घुमाव का निर्माण करेगी।
एक ही यांत्रिक डिजाइन का तीन-चरण स्टेपर मोटर में सफलतापूर्वक उपयोग किया जाता है ... केवल प्रत्येक वाइंडिंग में नियंत्रण द्वारा विशेष नियंत्रक (स्टेपर मोटर चालक) ऊपर वर्णित एल्गोरिथम के अनुसार लगातार दालों को लगाया और हटाया जाता है।
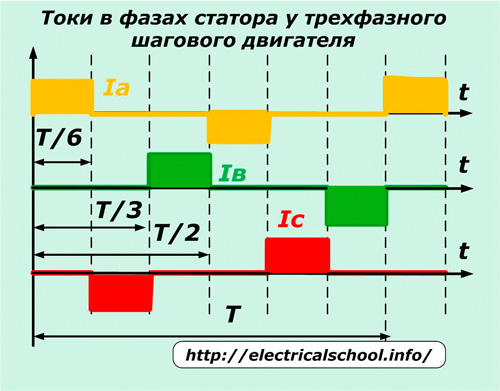
उनका स्टार्ट-अप एक घूर्णी गति शुरू करता है, और एक निश्चित समय पर उनकी समाप्ति शाफ्ट का एक मापा रोटेशन प्रदान करती है और कुछ तकनीकी संचालन करने के लिए प्रोग्राम किए गए कोण पर रुकती है।
वर्णित दोनों तीन-चरण प्रणालियों में, आर्मेचर के रोटेशन की दिशा को बदलना संभव है। ऐसा करने के लिए, आपको बस "ए" - "बी" - "सी" चरणों के अनुक्रम को दूसरे में बदलना होगा, उदाहरण के लिए "ए" - "सी" - "बी"।
रोटर की गति टी अवधि की लंबाई से नियंत्रित होती है। इसकी कमी से रोटेशन का त्वरण होता है।चरण में वर्तमान के आयाम का परिमाण घुमावदार के आंतरिक प्रतिरोध और उस पर लागू वोल्टेज के मूल्य पर निर्भर करता है। यह विद्युत मोटर की टोक़ और शक्ति की मात्रा निर्धारित करता है।
अतुल्यकालिक मोटर्स
इन मोटर डिज़ाइनों में घुमावदार के साथ एक ही स्टेटर चुंबकीय सर्किट होता है जैसा कि पहले चर्चा की गई एकल-चरण और तीन-चरण मॉडल में होता है। वे अपना नाम आर्मेचर और स्टेटर इलेक्ट्रोमैग्नेटिक फील्ड के एसिंक्रोनस रोटेशन से प्राप्त करते हैं। यह रोटर के विन्यास में सुधार करके किया जाता है।
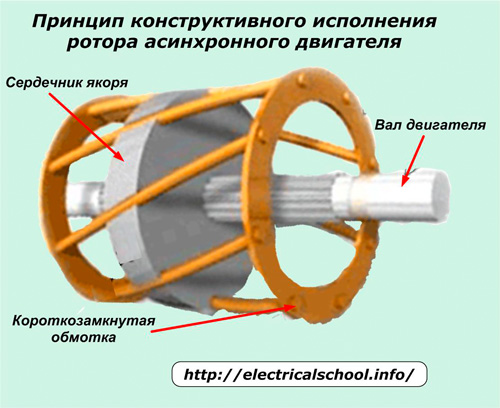
इसका कोर ग्रूव्ड इलेक्ट्रिकल स्टील प्लेट्स से बना है। वे एल्यूमीनियम या तांबे के वर्तमान कंडक्टर से लैस हैं, जो प्रवाहकीय छल्ले के साथ आर्मेचर के सिरों पर बंद हैं।
जब स्टेटर वाइंडिंग पर वोल्टेज लगाया जाता है, तो इलेक्ट्रोमोटिव बल द्वारा रोटर वाइंडिंग में एक विद्युत प्रवाह प्रेरित किया जाता है और एक आर्मेचर चुंबकीय क्षेत्र बनाया जाता है। जब ये विद्युत चुम्बकीय क्षेत्र परस्पर क्रिया करते हैं, तो मोटर शाफ्ट घूमने लगती है।
इस डिजाइन के साथ, रोटर की गति स्टेटर में एक घूर्णन विद्युत चुम्बकीय क्षेत्र की घटना के बाद ही संभव है, और यह इसके साथ संचालन के एक अतुल्यकालिक मोड में जारी रहता है।
अतुल्यकालिक मोटर्स डिजाइन में सरल हैं।इसलिए, वे सस्ते हैं और व्यापक रूप से औद्योगिक प्रतिष्ठानों और घरेलू उपकरणों में उपयोग किए जाते हैं।

एबीबी विस्फोट प्रूफ इलेक्ट्रिक मोटर
रैखिक मोटर्स
औद्योगिक तंत्र के कई कार्य निकाय एक विमान में पारस्परिक या अनुवाद संबंधी गति करते हैं, जो धातु मशीनों, वाहनों के संचालन के लिए आवश्यक है, बवासीर चलाते समय हथौड़े की चोट ...
रोटरी इलेक्ट्रिक मोटर से गियरबॉक्स, बॉल स्क्रू, बेल्ट ड्राइव और इसी तरह के यांत्रिक उपकरणों के माध्यम से इस तरह के काम करने वाले शरीर को स्थानांतरित करना डिजाइन को जटिल बनाता है। इस समस्या का आधुनिक तकनीकी समाधान एक रैखिक इलेक्ट्रिक मोटर का संचालन है।
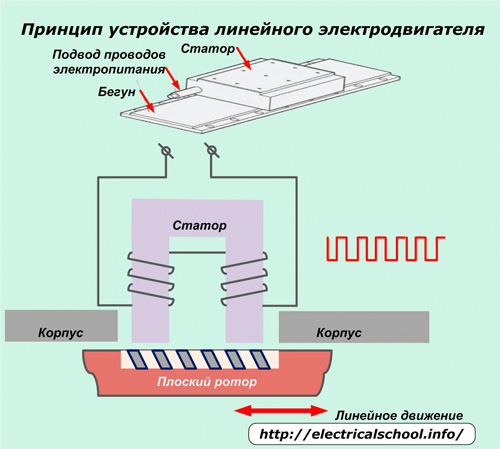
रोटरी इलेक्ट्रिक मोटर्स के रूप में, इसके स्टेटर और रोटर को रिंगों में लपेटने के बजाय स्ट्रिप्स के रूप में बढ़ाया जाता है।
ऑपरेशन का सिद्धांत एक निश्चित लंबाई के खुले चुंबकीय सर्किट के साथ स्थिर स्टेटर से विद्युत चुम्बकीय ऊर्जा के हस्तांतरण के कारण रनर रोटर को पारस्परिक रैखिक गति प्रदान करना है। वर्तमान में क्रमिक रूप से स्विच करके इसके अंदर एक कार्यशील चुंबकीय क्षेत्र बनाया जाता है।
यह कलेक्टर के साथ आर्मेचर वाइंडिंग पर कार्य करता है। ऐसी मोटर में उत्पन्न होने वाली ताकतें रोटर को केवल गाइड तत्वों के साथ एक रेखीय दिशा में ले जाती हैं।
लीनियर मोटर्स को डायरेक्ट करंट या अल्टरनेटिंग करंट पर काम करने के लिए डिज़ाइन किया गया है और यह सिंक्रोनस या एसिंक्रोनस मोड में काम कर सकता है।
रैखिक मोटर्स के नुकसान हैं:
-
प्रौद्योगिकी की जटिलता;
-
उच्च कीमत;
-
कम ऊर्जा दक्षता।