आवृत्ति के साथ पंप इकाइयों की इलेक्ट्रिक ड्राइव
 केन्द्रापसारक पंपों के ऑपरेटिंग मोड उनके पहियों की घूर्णन गति को बदलकर समायोजित करने के लिए सबसे अधिक ऊर्जा कुशल हैं। यदि ड्राइव मोटर के रूप में एक समायोज्य इलेक्ट्रिक ड्राइव का उपयोग किया जाता है, तो पहियों के घूमने की गति को बदला जा सकता है।
केन्द्रापसारक पंपों के ऑपरेटिंग मोड उनके पहियों की घूर्णन गति को बदलकर समायोजित करने के लिए सबसे अधिक ऊर्जा कुशल हैं। यदि ड्राइव मोटर के रूप में एक समायोज्य इलेक्ट्रिक ड्राइव का उपयोग किया जाता है, तो पहियों के घूमने की गति को बदला जा सकता है।
गैस टर्बाइनों और आंतरिक दहन इंजनों की डिजाइन और विशेषताएं ऐसी हैं कि वे आवश्यक सीमा के भीतर घूर्णी गति में बदलाव प्रदान कर सकते हैं।
डिवाइस की यांत्रिक विशेषताओं का उपयोग करके प्रत्येक तंत्र की रोटेशन गति को समायोजित करने की प्रक्रिया का आसानी से विश्लेषण किया जाता है।
पंप और इलेक्ट्रिक मोटर से युक्त पंपिंग इकाई की यांत्रिक विशेषताओं पर विचार करें। अंजीर में। 1 चेक वाल्व (वक्र 1) और गिलहरी-पिंजरे रोटर (वक्र 2) के साथ एक इलेक्ट्रिक मोटर से लैस एक केन्द्रापसारक पंप की यांत्रिक विशेषताओं को दर्शाता है।
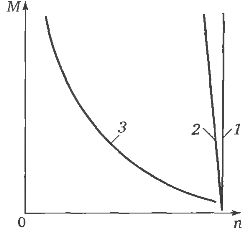
चावल। 1. पम्पिंग इकाई की यांत्रिक विशेषताएं
इलेक्ट्रिक मोटर के टॉर्क वैल्यू और पंप के रेजिस्टेंस टॉर्क के बीच के अंतर को डायनेमिक टॉर्क कहा जाता है।यदि मोटर का टॉर्क पंप के प्रतिरोध के क्षण से अधिक है, तो डायनेमिक टॉर्क को पॉजिटिव माना जाता है, अगर यह कम है, तो यह नेगेटिव है।
एक सकारात्मक गतिशील क्षण के प्रभाव में, पंप इकाई त्वरण के साथ काम करना शुरू कर देती है, अर्थात। तेज करता है। यदि डायनेमिक टॉर्क नेगेटिव है, तो पंप यूनिट देरी से चलती है, यानी धीरे करता है।
जब ये क्षण समान होते हैं, तो संचालन का एक स्थिर तरीका होता है, अर्थात। पंप इकाई एक स्थिर गति से चलती है। यह गति और संबंधित टोक़ विद्युत मोटर और पंप की यांत्रिक विशेषताओं के प्रतिच्छेदन द्वारा निर्धारित किया जाता है (चित्र 1 में बिंदु)।
यदि समायोजन की प्रक्रिया में एक तरह से या किसी अन्य यांत्रिक विशेषता में परिवर्तन होता है, उदाहरण के लिए, इलेक्ट्रिक मोटर के रोटर सर्किट में एक अतिरिक्त रोकनेवाला पेश करके नरम हो जाता है (चित्र 1 में वक्र 3), इलेक्ट्रिक मोटर का टोक़ प्रतिरोध के क्षण में छोटा हो जाएगा।
एक नकारात्मक गतिशील टोक़ के प्रभाव में, पंप इकाई देरी से काम करना शुरू कर देती है, अर्थात। तब तक धीमा हो जाता है जब तक कि टोक़ और प्रतिरोध क्षण फिर से संतुलित नहीं हो जाते (चित्र 1 में बिंदु बी)। यह बिंदु गति और टॉर्क के आइगेनवैल्यू से मेल खाता है।
इस प्रकार, पंपिंग यूनिट के रोटेशन की गति को नियंत्रित करने की प्रक्रिया लगातार इलेक्ट्रिक मोटर के टॉर्क में बदलाव और पंप के प्रतिरोध के क्षण के साथ होती है।
पंप की गति का नियंत्रण या तो इलेक्ट्रिक मोटर की गति को बदलकर किया जा सकता है, जो पंप से सख्ती से जुड़ा हुआ है, या पंप को इलेक्ट्रिक मोटर से जोड़ने वाले ट्रांसमिशन के गियर अनुपात को बदलकर, जो एक स्थिर गति से चलता है।

इलेक्ट्रिक मोटर्स के रोटेशन की गति का विनियमन
एसी मोटर्स मुख्य रूप से पम्पिंग इकाइयों में उपयोग की जाती हैं। एक एसी मोटर की घूर्णी गति आपूर्ति धारा f की आवृत्ति, पोल जोड़े p की संख्या और स्लिप s पर निर्भर करती है। इनमें से एक या अधिक मापदंडों को बदलकर, आप विद्युत मोटर और इससे जुड़े पंप की गति को बदल सकते हैं।
फ्रीक्वेंसी इलेक्ट्रिक ड्राइव का मुख्य तत्व है फ्रिक्वेंसी परिवर्तक... इन्वर्टर में एक स्थिर ग्रिड फ्रीक्वेंसी f1 होती है जिसे वेरिएबल e2 में बदल दिया जाता है। आवृत्ति के अनुपात में e2 कनवर्टर के आउटपुट से जुड़े इलेक्ट्रिक मोटर की गति को बदलता है।
एक आवृत्ति कनवर्टर के साथ, मुख्य वोल्टेज U1 और आवृत्ति व्यावहारिक रूप से नहीं बदलती है f1 नियंत्रण प्रणाली के लिए आवश्यक चर मापदंडों U2 और e2 में परिवर्तित हो जाती है। विद्युत मोटर के स्थिर संचालन को सुनिश्चित करने के लिए, वर्तमान और चुंबकीय प्रवाह के संदर्भ में इसके अधिभार को सीमित करने के लिए, आवृत्ति कनवर्टर में उच्च ऊर्जा संकेतक बनाए रखने के लिए, इसके इनपुट और आउटपुट मापदंडों के बीच एक निश्चित अनुपात के प्रकार के आधार पर बनाए रखा जाना चाहिए। यांत्रिक पंप विशेषताओं। ये संबंध आवृत्ति नियंत्रण कानून समीकरण से प्राप्त होते हैं।
पंपों के लिए, अनुपात देखा जाना चाहिए:
U1 / f1 = U2 / f2 = स्थिरांक
अंजीर में। 2 आवृत्ति विनियमन के साथ प्रेरण मोटर की यांत्रिक विशेषताओं को दर्शाता है।जैसे ही आवृत्ति f2 घटती है, यांत्रिक विशेषता न केवल n-M निर्देशांक में अपनी स्थिति बदलती है, बल्कि कुछ हद तक इसका आकार भी बदलती है। विशेष रूप से, इलेक्ट्रिक मोटर का अधिकतम टॉर्क कम हो जाता है। यह इस तथ्य के कारण है कि U1 / f1 = U2 / f2 = const के अनुपात के साथ और आवृत्ति में परिवर्तन f1 मोटर टॉर्क के परिमाण पर स्टेटर के सक्रिय प्रतिरोध के प्रभाव को ध्यान में नहीं रखता है।

चावल। 2. अधिकतम (1) और कम (2) आवृत्तियों पर आवृत्ति इलेक्ट्रिक ड्राइव की यांत्रिक विशेषताएं
आवृत्ति को समायोजित करते समय, इस प्रभाव को ध्यान में रखते हुए, अधिकतम टोक़ अपरिवर्तित रहता है, यांत्रिक विशेषता का आकार संरक्षित होता है, केवल इसकी स्थिति बदल जाती है।
फ्रीक्वेंसी कन्वर्टर्स के साथ पल्स चौड़ाई मॉडुलन (PWM) इस तथ्य के कारण उच्च ऊर्जा विशेषताएँ हैं कि कनवर्टर के आउटपुट पर साइनसॉइडल के पास आने वाले वर्तमान और वोल्टेज घटता का आकार प्रदान किया जाता है। हाल ही में, आईजीबीटी मॉड्यूल (इन्सुलेटेड गेट बाइपोलर ट्रांजिस्टर) पर आधारित फ्रीक्वेंसी कन्वर्टर्स सबसे व्यापक हैं।
IGBT मॉड्यूल एक उच्च दक्षता वाला प्रमुख तत्व है। इसमें लो वोल्टेज ड्रॉप, हाई स्पीड और लो स्विचिंग पावर की सुविधा है। एक अतुल्यकालिक मोटर को नियंत्रित करने के लिए PWM और वेक्टर एल्गोरिथ्म के साथ IGBT मॉड्यूल पर आधारित फ़्रीक्वेंसी कन्वर्टर के अन्य प्रकार के कन्वर्टर्स पर फायदे हैं। संपूर्ण आउटपुट फ़्रीक्वेंसी रेंज में इसका एक उच्च शक्ति कारक है।
कनवर्टर का योजनाबद्ध आरेख अंजीर में दिखाया गया है। 3.
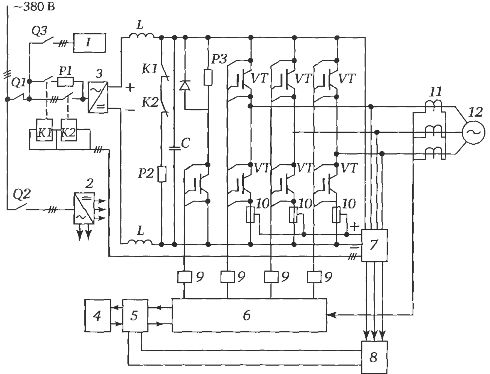
चावल। 3.आईजीबीटी मॉड्यूल के आवृत्ति कनवर्टर की योजना: 1 - प्रशंसकों का ब्लॉक; 2 - बिजली की आपूर्ति; 3 - अनियंत्रित सुधारक; 4 - नियंत्रण कक्ष; 5 - नियंत्रण कक्ष बोर्ड; 6 - पीडब्लूएम; 7 - वोल्टेज रूपांतरण इकाई; 8 - सिस्टम कंट्रोल बोर्ड; 9 - चालक; 10 - इन्वर्टर यूनिट के लिए फ़्यूज़; 11 - वर्तमान सेंसर; 12 - अतुल्यकालिक गिलहरी-पिंजरे मोटर; Q1, Q2, Q3 - पावर सर्किट, कंट्रोल सर्किट और फैन यूनिट के लिए स्विच; K1, K2 - कैपेसिटर और पावर सर्किट चार्ज करने के लिए संपर्ककर्ता; सी - कैपेसिटर बैंक; आरएल, आर 2, आर 3 - कैपेसिटर चार्ज की वर्तमान सीमा को सीमित करने के लिए प्रतिरोधक, कैपेसिटर का निर्वहन और नाली ब्लॉक; वीटी - इन्वर्टर पावर स्विच (आईजीबीटी मॉड्यूल)
फ़्रीक्वेंसी कन्वर्टर के आउटपुट पर, एक वोल्टेज (करंट) कर्व बनता है, जो एक साइनसॉइड से थोड़ा अलग होता है, जिसमें उच्च हार्मोनिक घटक होते हैं। उनकी उपस्थिति से इलेक्ट्रिक मोटर में नुकसान में वृद्धि होती है। इस कारण से, जब इलेक्ट्रिक ड्राइव रेटेड गति के करीब गति से चलती है, तो इलेक्ट्रिक मोटर ओवरलोड हो जाती है।
कम गति पर संचालन करते समय, पंप ड्राइव में प्रयुक्त स्व-हवादार इलेक्ट्रिक मोटर्स के लिए शीतलन की स्थिति बिगड़ जाती है। पंपिंग इकाइयों (1: 2 या 1: 3) की सामान्य नियंत्रण सीमा में, वेंटिलेशन की स्थिति में गिरावट की भरपाई प्रवाह दर और पंप हेड में कमी के कारण लोड में महत्वपूर्ण कमी से की जाती है।
नाममात्र मूल्य (50 हर्ट्ज) के करीब आवृत्तियों पर संचालन करते समय, उच्च क्रम के हार्मोनिक्स की उपस्थिति के साथ संयोजन में शीतलन की स्थिति में गिरावट के लिए अनुमेय यांत्रिक शक्ति में 8-15% की कमी की आवश्यकता होती है।इसके कारण, इलेक्ट्रिक मोटर का अधिकतम टॉर्क 1 - 2% कम हो जाता है, इसकी दक्षता - 1 - 4%, cosφ - 5-7% कम हो जाती है।
इलेक्ट्रिक मोटर को ओवरलोडिंग से बचाने के लिए, या तो इसकी गति के ऊपरी मूल्य को सीमित करना या ड्राइव को अधिक शक्तिशाली इलेक्ट्रिक मोटर से लैस करना आवश्यक है। अंतिम उपाय अनिवार्य है जब पम्पिंग यूनिट को आवृत्ति e2> 50 हर्ट्ज पर संचालित करने के लिए डिज़ाइन किया गया हो। इंजन क्रांतियों के ऊपरी मूल्य को सीमित करने के लिए आवृत्ति e2 को 48 हर्ट्ज तक सीमित करके किया जाता है। ड्राइव मोटर की रेटेड शक्ति में वृद्धि को निकटतम मानक मान तक गोल किया जाता है।

चर इलेक्ट्रिक ब्लॉक ड्राइव का समूह नियंत्रण
कई पंप सेट में कई ब्लॉक होते हैं। एक नियम के रूप में, सभी इकाइयाँ एक समायोज्य इलेक्ट्रिक ड्राइव से सुसज्जित नहीं हैं। दो या तीन स्थापित इकाइयों से, यह एक समायोज्य इलेक्ट्रिक ड्राइव से लैस करने के लिए पर्याप्त है। यदि एक कनवर्टर स्थायी रूप से इकाइयों में से एक से जुड़ा हुआ है, तो उनके मोटर संसाधन की असमान खपत होती है, क्योंकि चर गति ड्राइव से लैस इकाई का उपयोग अधिक समय तक किया जाता है।
स्टेशन पर स्थापित सभी ब्लॉकों के बीच भार के समान वितरण के लिए, समूह नियंत्रण स्टेशन विकसित किए गए हैं, जिनकी मदद से ब्लॉकों को श्रृंखला में कनवर्टर से जोड़ा जा सकता है। नियंत्रण स्टेशन आमतौर पर कम वोल्टेज इकाइयों (380 वी) के लिए निर्मित होते हैं।
आमतौर पर, कम वोल्टेज नियंत्रण स्टेशनों को दो या तीन इकाइयों को नियंत्रित करने के लिए डिज़ाइन किया गया है।लो-वोल्टेज कंट्रोल स्टेशनों में सर्किट ब्रेकर शामिल होते हैं जो चरण-चरण शॉर्ट सर्किट और ग्राउंडिंग से सुरक्षा प्रदान करते हैं, उपकरणों को ओवरलोड से बचाने के लिए थर्मल रिले, साथ ही नियंत्रण उपकरण (स्विच, बटन पोस्ट और दूसरे।)।
नियंत्रण स्टेशन के स्विचिंग सर्किट में आवश्यक इंटरलॉक होते हैं जो आवृत्ति कनवर्टर को किसी भी चयनित ब्लॉक से कनेक्ट करने और पंपिंग या उड़ाने वाली इकाई के संचालन के तकनीकी मोड को परेशान किए बिना काम करने वाले ब्लॉकों को बदलने की अनुमति देते हैं।
नियंत्रण स्टेशन, एक नियम के रूप में, बिजली तत्वों (स्वचालित स्विच, संपर्ककर्ता, आदि) के साथ मिलकर नियंत्रण और विनियमन उपकरण (माइक्रोप्रोसेसर नियंत्रक, आदि) होते हैं।
ग्राहक के अनुरोध पर, स्टेशनों को बैकअप पावर (एटीएस) पर स्वचालित स्विचिंग, उपभोग की गई बिजली के व्यावसायिक माप, शटडाउन उपकरणों के नियंत्रण के लिए उपकरणों से सुसज्जित किया गया है।
यदि आवश्यक हो, अतिरिक्त उपकरणों को नियंत्रण स्टेशन में पेश किया जाता है, जो इकाइयों के नरम स्टार्टर के आवृत्ति कनवर्टर के साथ उपयोग सुनिश्चित करता है।
स्वचालित नियंत्रण स्टेशन प्रदान करते हैं:
-
तकनीकी पैरामीटर (दबाव, स्तर, तापमान, आदि) के निर्धारित मूल्य को बनाए रखना;
-
विनियमित और गैर-विनियमित इकाइयों (खपत वर्तमान, शक्ति का नियंत्रण) और उनकी सुरक्षा के इलेक्ट्रिक मोटर्स के ऑपरेटिंग मोड का नियंत्रण;
-
मुख्य डिवाइस की विफलता के मामले में बैकअप डिवाइस की स्वचालित शुरुआत;
-
आवृत्ति कनवर्टर की विफलता के मामले में ब्लॉक को सीधे नेटवर्क पर स्विच करना;
-
बैकअप (एटीएस) विद्युत इनपुट पर स्वत: स्विचिंग;
-
बिजली आपूर्ति नेटवर्क में नुकसान और गहरे वोल्टेज की गिरावट के बाद स्टेशन का स्वत: पुन: संयोजन (एआर);
-
एक निश्चित समय पर काम करने वाली इकाइयों को रोकने और शुरू करने के साथ स्टेशन के संचालन मोड का स्वत: परिवर्तन;
-
एक अतिरिक्त अनियंत्रित इकाई का स्वचालित सक्रियण यदि नियंत्रित इकाई, नाममात्र गति तक पहुँचती है, तो आवश्यक जल आपूर्ति प्रदान नहीं करती है;
-
मोटर संसाधनों की एक समान खपत सुनिश्चित करने के लिए निश्चित अंतराल पर कार्य ब्लॉकों का स्वत: प्रत्यावर्तन;
-
नियंत्रण कक्ष से या नियंत्रण कक्ष से पम्पिंग (उड़ाने) इकाई के संचालन मोड का परिचालन नियंत्रण।
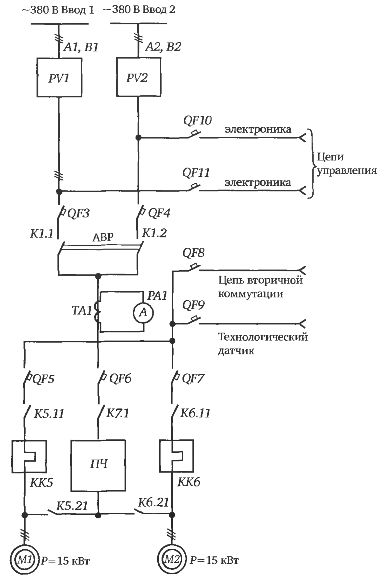
चावल। 4. चर आवृत्ति पंपों के इलेक्ट्रिक ड्राइव के समूह नियंत्रण के लिए स्टेशन
पंपिंग इकाइयों में चर आवृत्ति का उपयोग करने की दक्षता
एक चर आवृत्ति ड्राइव का उपयोग आपको महत्वपूर्ण रूप से ऊर्जा बचाने की अनुमति देता है, क्योंकि यह कम प्रवाह दर पर बड़ी पंपिंग इकाइयों का उपयोग करना संभव बनाता है। इसके लिए धन्यवाद, यह संभव है, इकाइयों की इकाई क्षमता में वृद्धि करके, उनकी कुल संख्या को कम करने के लिए और तदनुसार, इमारतों के समग्र आयामों को कम करने के लिए, स्टेशन की हाइड्रोलिक योजना को सरल बनाने और पाइपलाइनों की संख्या को कम करने के लिए वाल्व।
इस प्रकार, पंपिंग इकाइयों में समायोज्य इलेक्ट्रिक ड्राइव का उपयोग, बिजली और पानी की बचत के साथ-साथ पंपिंग इकाइयों की संख्या को कम करने, स्टेशन के हाइड्रोलिक सर्किट को सरल बनाने और पंपिंग स्टेशन के भवन के निर्माण की मात्रा को कम करने की अनुमति देता है।इस संबंध में, द्वितीयक आर्थिक प्रभाव उत्पन्न होते हैं: भवन के ताप, प्रकाश और मरम्मत की लागत कम हो जाती है, स्टेशनों के उद्देश्य और अन्य विशिष्ट स्थितियों के आधार पर कम लागत को 20-50% तक कम किया जा सकता है।
फ़्रीक्वेंसी कन्वर्टर्स के लिए तकनीकी दस्तावेज़ीकरण से पता चलता है कि पंपिंग इकाइयों में एक समायोज्य इलेक्ट्रिक ड्राइव का उपयोग आपको स्वच्छ और अपशिष्ट जल को पंप करने पर खर्च की गई ऊर्जा का 50% तक बचाने की अनुमति देता है, और पेबैक की अवधि तीन से नौ महीने तक होती है।
उसी समय, ऑपरेटिंग पंप इकाइयों में नियंत्रित इलेक्ट्रिक ड्राइव की प्रभावशीलता की गणना और विश्लेषण से पता चलता है कि 75 किलोवाट तक की शक्ति वाली इकाइयों वाली छोटी पंप इकाइयों के लिए, विशेष रूप से जब वे एक बड़े स्थिर दबाव घटक के साथ काम करते हैं, तो यह पता चलता है नियंत्रित इलेक्ट्रिक ड्राइव का उपयोग करने के लिए उपयुक्त नहीं है। इन मामलों में, आप थ्रॉटलिंग का उपयोग करके, काम कर रहे पंप इकाइयों की संख्या को बदलकर सरल नियंत्रण प्रणाली का उपयोग कर सकते हैं।
पंप इकाई स्वचालन प्रणालियों में चर विद्युत ड्राइव का उपयोग, एक ओर, ऊर्जा की खपत को कम करता है, और दूसरी ओर, अतिरिक्त पूंजी लागतों की आवश्यकता होती है, इसलिए पंप इकाइयों में चर विद्युत ड्राइव का उपयोग कम लागतों की तुलना करके निर्धारित किया जाता है दो विकल्पों में से: बुनियादी और नया। एक नए विकल्प के रूप में, एक समायोज्य इलेक्ट्रिक ड्राइव से लैस एक पंपिंग इकाई को मुख्य के रूप में लिया जाता है, और एक इकाई जिसकी इकाइयां एक स्थिर गति से काम करती हैं।