मुख्य क्रेन तंत्र के इंजनों पर स्थिर भार
लोड उठाने के स्थिर मोड में क्रेन लहरा के मोटर शाफ्ट की शक्ति और टोक़ की गणना सूत्रों द्वारा की जा सकती है
जहां P मोटर शाफ्ट की शक्ति है, kW; जी भार उठाने के लिए आवश्यक बल है, एन; G0 - ग्रिपिंग डिवाइस का भारोत्तोलन बल, N; एम मोटर शाफ्ट पल है, एनएम; v भार उठाने की गति है, m / s; डी टोइंग विंच ड्रम का व्यास है, मी; η - भारोत्तोलन तंत्र की दक्षता; i गियरबॉक्स और चेन होइस्ट का गियर अनुपात है।
अवरोही मोड में, क्रेन इंजन घर्षण शक्ति Ptr और शक्ति के बीच के अंतर के बराबर शक्ति विकसित करता है, जो अवरोही भार Pgr के भार की क्रिया के कारण होता है:
मध्यम और भारी भार को कम करते समय, गियर शाफ्ट से मोटर को ऊर्जा निर्देशित की जाती है क्योंकि Pgr >> Ptr (ब्रेक रिलीज)। इस मामले में, मोटर शाफ्ट शक्ति, kW, सूत्र द्वारा व्यक्त की जाएगी

प्रकाश भार या खाली हुक को कम करते समय, ऐसे मामले हो सकते हैं जहां Pgr <Ptr।इस मामले में, इंजन गति के क्षण (पावर डिसेंट) के साथ काम करता है और पावर, kW विकसित करता है,

दिए गए सूत्रों के आधार पर, हुक पर किसी भी भार पर क्रेन मोटर की शक्ति निर्धारित करना संभव है। गणना करते समय, यह याद रखना चाहिए कि तंत्र की दक्षता उसके भार (चित्र 1) पर निर्भर करती है।
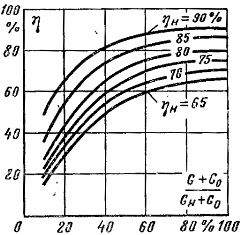
चावल। 1. भार पर तंत्र की दक्षता की निर्भरता।
संचालन के स्थिर मोड में क्रेन के आंदोलन के क्षैतिज तंत्र के मोटर्स के शाफ्ट पर शक्ति और टोक़ सूत्रों द्वारा निर्धारित किया जा सकता है

जहां P क्रेन आंदोलन तंत्र की मोटर शाफ्ट शक्ति है, kW; एम आंदोलन तंत्र का मोटर शाफ्ट पल है, एनएम; जी - परिवहन किए गए कार्गो का वजन, एन; जी 1 - आंदोलन तंत्र का अपना वजन, एन; वी - गति की गति, एम / एस; R पहिये की त्रिज्या है, m; आर व्हील एक्सल की गर्दन की त्रिज्या है, मी; μ - फिसलने वाले घर्षण का गुणांक (μ = 0.08-0.12); एफ - रोलिंग घर्षण गुणांक, एम (एफ = 0.0005 - 0.001 मीटर); η - आंदोलन तंत्र की दक्षता; कश्मीर - रेल पर पहिया निकला हुआ किनारा के घर्षण के लिए गुणांक लेखांकन; मैं - अंडरकारेज रेड्यूसर का गियर अनुपात।
कई उठाने और परिवहन तंत्रों में, आंदोलन क्षैतिज दिशा में नहीं होता है। वायु भार आदि का प्रभाव भी संभव है। इस मामले में शक्ति का निर्धारण करने के सूत्र को इस रूप में दर्शाया जा सकता है

अतिरिक्त रूप से चिह्नित: α - क्षैतिज तल पर गाइडों के झुकाव का कोण; एफ - विशिष्ट पवन भार, एन / एम 2; S वह क्षेत्र है जिस पर हवा का दबाव 90 °, m2 के कोण पर कार्य करता है।
अंतिम सूत्र में, पहला शब्द क्षैतिज गति के दौरान घर्षण को दूर करने के लिए आवश्यक मोटर शाफ्ट शक्ति की विशेषता है; दूसरा कार्यकाल लिफ्ट बल से मेल खाता है, तीसरा पवन भार से शक्ति घटक है।
कई क्रेनों में एक टर्नटेबल होता है जिस पर काम करने वाले उपकरण स्थित होते हैं। प्लेटफॉर्म की गति एक गियर व्हील (टर्नटेबल) के माध्यम से प्रेषित होती है, जिस पर डीकेपी व्यास लगा होता है। प्लेटफ़ॉर्म और निश्चित आधार के बीच dp के व्यास वाले रोलर्स (रोलर्स) होते हैं। इस मामले में, घर्षण बल के कारण क्रेन मोटर की शक्ति और टोक़ समान रूप से पारस्परिक गति के मामले में पाए जाते हैं, अर्थात्:

यहाँ, ज्ञात मूल्यों के अलावा: G2 उस पर सभी उपकरणों के साथ टर्नटेबल का भार है, N; ωl - कोणीय वेग, प्लेटफार्म, रेड/सेकंड; में - स्विंग मैकेनिज्म गियरबॉक्स का गियर अनुपात और ट्रांसमिशन का ड्राइव गियर - टर्नटेबल।

क्रेन इलेक्ट्रिक ड्राइव की शक्ति का निर्धारण करते समय, कुछ मामलों में ढलान पर काम करते समय भार में परिवर्तन को ध्यान में रखना आवश्यक होता है। घूर्णन तंत्र पर हवा का भार लोड, क्रेन बूम और काउंटरवेट पर कार्य करने वाली पवन शक्तियों में अंतर को ध्यान में रखकर निर्धारित किया जाता है।
क्रेन मैकेनिज्म के लिए इलेक्ट्रिक ड्राइव डिजाइन करते समय, मोटर चयन के अंत में, इलेक्ट्रिक ड्राइव को अनुमेय त्वरण मूल्यों के लिए जांचा जाता है, जिसके लिए डेटा तालिका 1 में दिया गया है
तालिका 1 तंत्रों का नाम और उनका उद्देश्य
तंत्र का नाम और उनका उद्देश्य त्वरण, एम / एस 2 तरल धातुओं, नाजुक वस्तुओं, उत्पादों, विभिन्न विधानसभा कार्यों को उठाने के लिए उठाने वाले तंत्र 0.1 विधानसभा और धातुकर्म कार्यशालाओं के पार्कों के उठाने के तंत्र 0.2 - 0.5 उठाने वाले क्रेन के उठाने के तंत्र 0.8 के लिए तंत्र सटीक असेंबली कार्य और तरल धातुओं के परिवहन के लिए क्रेन की आवाजाही, नाजुक वस्तुएं 0.1 - 0.2 गुरुत्वाकर्षण के आकर्षण बल के साथ आंदोलन तंत्र पूर्ण 0.2 - 0.7 पूर्ण पकड़ क्रेन ट्रॉली 0.8 - 1.4 क्रेन कुंडा 0.5 - 1.2