खराद समूह की धातु काटने वाली मशीनों के तंत्र की विद्युत मोटरों की शक्ति की गणना
गति नियंत्रण के साथ इलेक्ट्रिक मोटर की शक्ति की गणना करते समय, तंत्र की यांत्रिक विशेषताओं को ध्यान में रखा जाना चाहिए।
मूल गति तंत्र के लिए, जिसमें दो-ज़ोन गति नियंत्रण लागू किया जाता है: निरंतर टोक़ और निरंतर शक्ति के साथ, विद्युत मोटर की शक्ति की गणना सूत्र द्वारा की जाती है
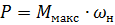
जहां: Mmax - निरंतर लोड के तहत अधिकतम प्रतिरोध और बार-बार शॉर्ट-टर्म लोड के तहत अधिकतम समकक्ष प्रतिरोध; ωn - निरंतर टोक़ समायोजन (नाममात्र प्रवाह दर पर) के साथ अधिकतम गति।
पावर ड्राइव के लिए, अधिकतम समतुल्य टोक़ और अधिकतम गति के आधार पर शक्ति निर्धारित की जाती है। गति विनियमन की एक बड़ी श्रृंखला के साथ, स्वतंत्र वेंटिलेशन या बंद प्रकार के साथ इलेक्ट्रिक मोटर्स का उपयोग करने की सिफारिश की जाती है। सेल्फ-वेंटिलेशन वाली इलेक्ट्रिक मोटर का उपयोग करते समय, कम गति पर इसकी कूलिंग की गिरावट को ध्यान में रखना आवश्यक है।
अनियंत्रित इंजनों के लिए, एक नियम के रूप में, S6 मोड में काम कर रहा है (यदि चक्र 10 मिनट से अधिक नहीं होता है), बिजली की गणना निम्नानुसार की जाती है।
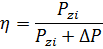
प्रत्येक ऑपरेशन के लिए विद्युत मोटर की शक्ति सूत्र द्वारा निर्धारित की जाती है:

जहां: Pzi, η - मशीन की क्रमशः काटने की शक्ति और दक्षता।
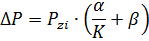
लोड-निर्भर दक्षता अभिव्यक्ति के आधार पर, बिजली के नुकसान के आधार पर निर्धारित की जाती है:

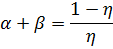
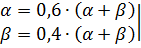
कहाँ पे: Pnz - नाममात्र काटने की शक्ति; α और β - निरंतर और परिवर्तनीय हानि गुणांक।
लोड फैक्टर को ध्यान में रखते हुए

मशीन दक्षता
के = 1 मामले के लिए
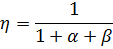
प्रत्येक भार पर दक्षता निर्धारित करने के लिए हानियों को विभाजित करना देता है
व्यावहारिक गणना के लिए प्रारंभिक स्वीकार किया जाता है
टर्निंग, मिलिंग, ड्रिलिंग मशीनों के मुख्य संचलन के ड्राइव के लिए, निरंतर भार के तहत दक्षता 0.7 ... 0.8 है, पीसने वाली मशीनों के लिए 0.8 ... 0.9। मशीन के निष्क्रिय क्रांतियों पर विद्युत मोटर की शक्ति सूत्र द्वारा निर्धारित की जाती है:

प्रत्येक संक्रमण के लिए ऑपरेशन की अवधि सूत्र द्वारा निर्धारित की जाती है:

जहां: एल - संक्रमण की लंबाई, मिमी; एस - फ़ीड, मिमी / रेव; n - धुरी के घूमने की गति, रेव / मिनट।
भाग को स्थापित करने और निकालने का समय 1-3 मिनट के बराबर है। प्रत्येक ऑपरेशन के लिए गणना की गई शक्ति और समय के आधार पर, एक लोड आरेख का निर्माण किया जाता है और समतुल्य शक्ति निर्धारित की जाती है।

गति नियंत्रण के साथ एक इलेक्ट्रिक ड्राइव का उपयोग करते समय, प्रति घंटे भार और शुरुआती आवृत्ति दोनों के संदर्भ में, शक्ति के मामले में मोटर का चयन करते समय सबसे गंभीर ऑपरेटिंग मोड माना जाता है।
इस मामले में, इलेक्ट्रिक मोटर का प्रारंभिक चयन समतुल्य टोक़ के अनुसार किया जाता है, केडी = 1.1-1.5 की सीमा के भीतर गतिशीलता के लिए सुरक्षा कारक और समावेशन की सबसे संभावित अवधि को ध्यान में रखते हुए।
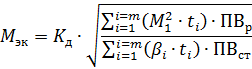
जहां: βi - गुणांक जो i -th अंतराल में इलेक्ट्रिक मोटर के ठंडा होने की गिरावट को ध्यान में रखता है, जब गति नाममात्र से कम हो जाती है;
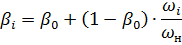
β- स्थिर आर्मेचर के मामले में गर्मी हस्तांतरण की गिरावट का गुणांक; पीवीआर, पीवीएसटी - समावेशन की अवधि की गणना और मानक मूल्य।
इंजन की शक्ति सूत्र द्वारा निर्धारित की जाती है
मोटर, वर्कपीस और मशीन के यांत्रिक भागों की जड़ता के वास्तविक क्षण को ध्यान में रखते हुए एक अधिभार और ताप क्षमता की जांच की जाती है।