वैकल्पिक विद्युत मशीनें
इलेक्ट्रिक मशीनों का उपयोग यांत्रिक ऊर्जा को विद्युत ऊर्जा (एसी और डीसी जनरेटर) और इसके विपरीत (इलेक्ट्रिक मोटर्स) में परिवर्तित करने के लिए किया जाता है।
इन सभी मामलों में, विद्युत चुंबकत्व के क्षेत्र में अनिवार्य रूप से तीन मुख्य खोजों का उपयोग किया जाता है: 1821 में एम्पीयर द्वारा खोजी गई धाराओं के यांत्रिक संपर्क की घटना, 1831 में फैराडे द्वारा खोजी गई विद्युत चुम्बकीय प्रेरण की घटना और इन घटनाओं का सैद्धांतिक सारांश लेन्ज़ (1834) ने प्रेरित धारा की दिशा के अपने प्रसिद्ध नियम में (वास्तव में, लेन्ज़ के नियम ने विद्युत चुम्बकीय प्रक्रियाओं के लिए ऊर्जा के संरक्षण के नियम की भविष्यवाणी की थी)।

यांत्रिक ऊर्जा को विद्युत ऊर्जा या इसके विपरीत में परिवर्तित करने के लिए, वर्तमान और चुंबकीय क्षेत्र (चुंबक या वर्तमान) के साथ एक प्रवाहकीय सर्किट के सापेक्ष आंदोलन को बनाना आवश्यक है।
निरंतर संचालन के लिए डिज़ाइन की गई विद्युत मशीनों में, स्थिर भाग (स्टेटर) के अंदर स्थित मशीन के गतिमान भाग (वैकल्पिक चालू मशीन का रोटर) की रोटरी गति का उपयोग किया जाता है।मशीन की कुंडली जो चुंबकीय क्षेत्र बनाने का काम करती है, प्रेरक कहलाती है, और जो कुंडली ऑपरेटिंग करंट के साथ चारों ओर बहती है, उसे आर्मेचर कहा जाता है। इन दोनों बाद वाले शब्दों का उपयोग डीसी मशीनों के लिए भी किया जाता है।
चुंबकीय प्रेरण को बढ़ाने के लिए, मशीन वाइंडिंग को फेरोमैग्नेटिक बॉडी (स्टील, कच्चा लोहा) पर रखा जाता है।
सभी विद्युत मशीनों में उत्क्रमणीयता का गुण होता है, अर्थात इनका उपयोग विद्युत ऊर्जा के जनरेटर और विद्युत मोटर दोनों के रूप में किया जा सकता है।

अतुल्यकालिक मोटर्स
अतुल्यकालिक मोटर्स का उपयोग किया जाता है विद्युत चुम्बकीय प्रेरण की अभिव्यक्तियों में से एक…भौतिक विज्ञान के पाठ्यक्रमों में इसे निम्नानुसार प्रदर्शित किया जाता है:
एक तांबे की डिस्क के नीचे, जो अपने केंद्र से होकर गुजरने वाली ऊर्ध्वाधर धुरी के चारों ओर घूम सकती है, एक ऊर्ध्वाधर घोड़े की नाल चुंबक को उसी धुरी के बारे में घुमाने के लिए प्रेरित किया जाता है (डिस्क और चुंबक के बीच यांत्रिक संपर्क को बाहर रखा गया है)। इस मामले में, डिस्क चुंबक के समान दिशा में घूमना शुरू कर देती है, लेकिन कम गति से। यदि आप डिस्क पर यांत्रिक भार बढ़ाते हैं (उदाहरण के लिए, थ्रस्ट बेयरिंग के विरुद्ध एक्सल के घर्षण को बढ़ाकर), तो इसकी घूर्णन गति कम हो जाती है।
इस घटना का भौतिक अर्थ विद्युत चुम्बकीय प्रेरण के सिद्धांत द्वारा आसानी से समझाया गया है: जब चुंबक घूमता है, तो एक घूर्णन चुंबकीय क्षेत्र बनाया जाता है, जो डिस्क में एड़ी धाराओं को प्रेरित करता है, बाद का परिमाण निर्भर करता है, अन्य चीजें समान होने पर, पर क्षेत्र और डिस्क की सापेक्ष गति।
लेंज के नियम के अनुसार, डिस्क को क्षेत्र की दिशा में घूमना चाहिए। घर्षण की अनुपस्थिति में, डिस्क को चुंबक के वेग के बराबर कोणीय वेग प्राप्त करना चाहिए, जिसके बाद प्रेरित ईएमएफ गायब हो जाएगा। वास्तविक जीवन में, घर्षण अनिवार्य रूप से मौजूद होता है और डिस्क धीमी हो जाती है।इसका परिमाण डिस्क द्वारा अनुभव किए गए यांत्रिक ब्रेकिंग पल पर निर्भर करता है।
डिस्क (रोटर) के घूर्णन की गति और चुंबकीय क्षेत्र के घूर्णन की गति के बीच विसंगति मोटरों के नाम से परिलक्षित होती है।
अतुल्यकालिक मोटर्स के संचालन का सिद्धांत:
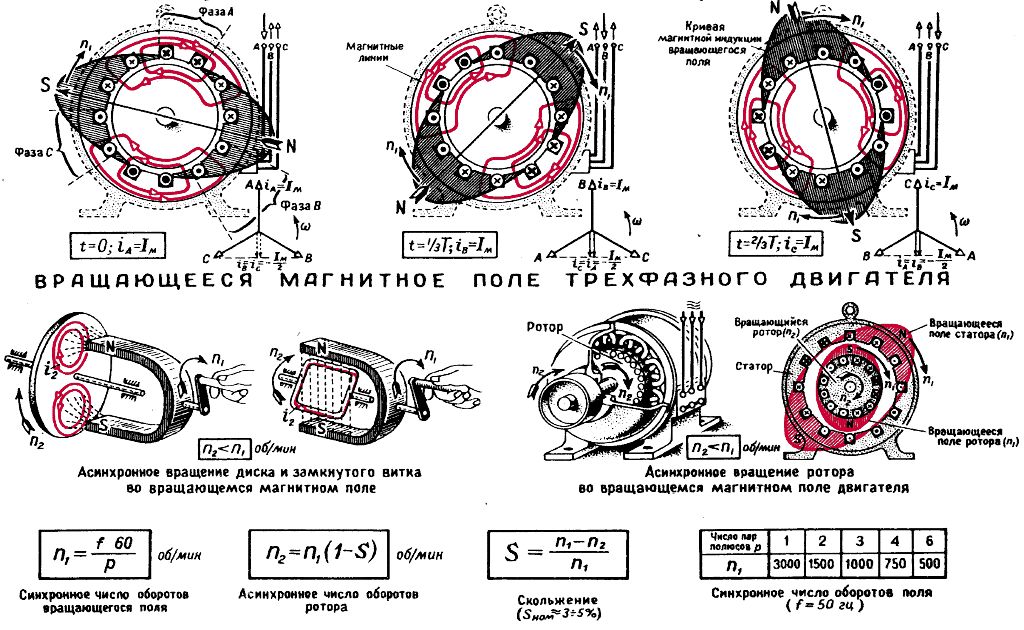
तकनीकी अतुल्यकालिक मोटर्स (अक्सर तीन-चरण) में एक घूर्णन चुंबकीय क्षेत्र बनाया जाता है पॉलीफ़ेज़ करंटस्थिर स्टेटर वाइंडिंग के चारों ओर बहना। तीन चरण वर्तमान की आवृत्ति पर है और स्टेटर कॉइल्स की संख्या 3p घूर्णन क्षेत्र एन = एफ / पी क्रांति / सेकंड बनाता है।

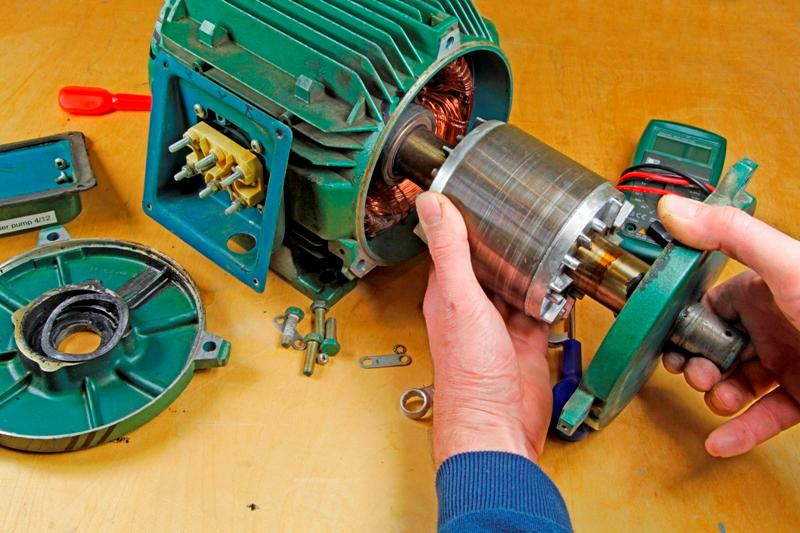
रोटेटेबल रोटर स्टेटर गुहा में स्थित है। एक घूर्णन तंत्र को इसके शाफ्ट से जोड़ा जा सकता है सरलतम "गिलहरी सेल" मोटर्स में, रोटर में स्टील बेलनाकार शरीर के खांचे में रखे अनुदैर्ध्य धातु की छड़ की एक प्रणाली होती है। तारों को दो छल्लों से शॉर्ट-सर्किट किया जाता है। टॉर्क को बढ़ाने के लिए रोटर की त्रिज्या को काफी बड़ा बनाया जाता है।
अन्य मोटर डिजाइनों (आमतौर पर उच्च शक्ति मोटर्स) में, रोटर तार एक खुली तीन-चरण घुमाव बनाते हैं। कॉइल्स के सिरों को रोटर में ही शॉर्ट-सर्किट किया जाता है, और लीड्स को रोटर शाफ्ट पर लगे तीन स्लिप रिंग्स में लाया जाता है और इससे अलग किया जाता है।
स्लाइडिंग कॉन्टैक्ट्स (ब्रश) का उपयोग करके एक तीन-चरण रिओस्टेट इन रिंगों से जुड़ा होता है, जो गति में मोटर को चालू करने का काम करता है। मोटर चालू होने के बाद, रिओस्टेट पूरी तरह से हटा दिया जाता है और रोटर एक गिलहरी पिंजरा बन जाता है (देखें - घाव वाले रोटर के साथ अतुल्यकालिक मोटर्स).

स्टेटर हाउसिंग पर एक टर्मिनल बोर्ड है। स्टेटर वाइंडिंग्स को उनके पास लाया जाता है। उन्हें शामिल किया जा सकता है तारा या त्रिकोण, मुख्य वोल्टेज पर निर्भर करता है: पहले मामले में मुख्य वोल्टेज दूसरे की तुलना में 1.73 गुना अधिक हो सकता है।
इंडक्शन मोटर के स्टेटर क्षेत्र की तुलना में रोटर के सापेक्ष मंदी को चिह्नित करने वाले मूल्य को कहा जाता है फिसल… यह 100% (मोटर शुरू करने के क्षण में) से शून्य (दोषरहित रोटर आंदोलन का आदर्श मामला) में बदल जाता है।
प्रेरण मोटर के रोटेशन की दिशा का उत्क्रमण मोटर की आपूर्ति करने वाले विद्युत नेटवर्क के प्रत्येक दो रैखिक कंडक्टरों के आपसी स्विचिंग द्वारा प्राप्त किया जाता है।

उद्योग में गिलहरी पिंजरे मोटर्स का व्यापक रूप से उपयोग किया जाता है। अतुल्यकालिक मोटर्स के फायदे डिजाइन की सादगी और स्लाइडिंग संपर्कों की अनुपस्थिति हैं।
कुछ समय पहले तक, ऐसी मोटरों का मुख्य नुकसान गति नियमन में कठिनाई थी, क्योंकि अगर इसके लिए स्टेटर सर्किट के वोल्टेज को बदल दिया जाता है, तो टॉर्क तेजी से बदलता है, लेकिन आपूर्ति की आवृत्ति को बदलना तकनीकी रूप से कठिन था। आधुनिक माइक्रोप्रोसेसर उपकरण अब व्यापक रूप से मोटरों की गति को बदलने के लिए आपूर्ति धारा की आवृत्ति को नियंत्रित करने के लिए उपयोग किए जाते हैं — आवृत्ति कन्वर्टर्स.
अल्टरनेटर
अल्टरनेटर महत्वपूर्ण शक्ति और उच्च वोल्टेज के लिए बनाए गए हैं। अतुल्यकालिक मशीनों की तरह, उनकी दो वाइंडिंग होती हैं। आम तौर पर, आर्मेचर वाइंडिंग स्टेटर हाउसिंग में स्थित होता है। प्राथमिक चुंबकीय प्रवाह बनाने वाले इंडिकेटर्स रोटर पर लगे होते हैं और एक एक्साइटर द्वारा संचालित होते हैं - रोटर शाफ्ट पर लगे एक छोटे डीसी जनरेटर। उच्च-शक्ति वाली मशीनों में, उत्तेजना कभी-कभी सुधारित वैकल्पिक वोल्टेज द्वारा बनाई जाती है।
आर्मेचर वाइंडिंग की गतिहीनता के कारण, उच्च शक्तियों पर स्लाइडिंग संपर्कों के उपयोग से जुड़ी तकनीकी कठिनाइयाँ गायब हो जाती हैं।
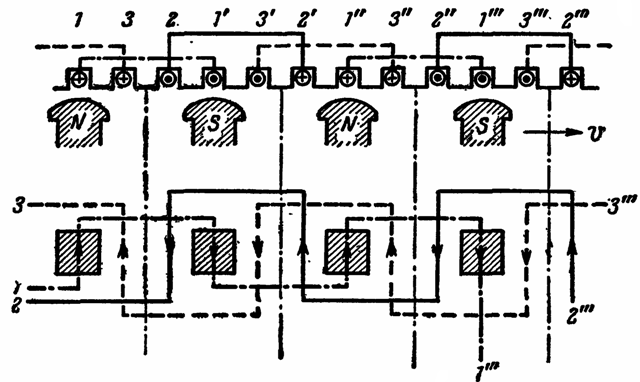
नीचे दिया गया आंकड़ा एकल-चरण जनरेटर का एक योजनाबद्ध दिखाता है। इसके रोटर में आठ पोल होते हैं। इन पर रोटर शाफ्ट पर लगे स्लिप रिंग्स पर लगाए गए डायरेक्ट करंट द्वारा बाहरी स्रोत से फीड किए गए घाव कॉइल (चित्र में नहीं दिखाए गए हैं)। पोल कॉइल्स को इस तरह से लपेटा जाता है कि स्टेटर का सामना करने वाले पोल के संकेत वैकल्पिक होते हैं। ध्रुवों की संख्या सम होनी चाहिए।
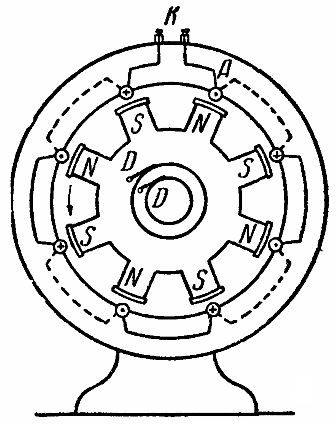
आर्मेचर वाइंडिंग स्टेटर हाउसिंग में स्थित है। इसके लंबे समय तक काम करने वाले "सक्रिय" तार, ड्राइंग के विमान के लंबवत, हलकों के साथ चित्र में दिखाए गए हैं, जब रोटर घूमता है तो उन्हें चुंबकीय प्रेरण की रेखाओं द्वारा पार किया जाता है।
मंडल प्रेरित विद्युत क्षेत्रों की दिशाओं का तात्कालिक वितरण दिखाते हैं। स्टेटर के सामने की तरफ चलने वाले कनेक्टिंग तारों को ठोस रेखाओं के साथ और पीछे की तरफ धराशायी लाइनों के साथ दिखाया गया है। K क्लैम्प का उपयोग बाहरी सर्किट को स्टेटर वाइंडिंग से जोड़ने के लिए किया जाता है। रोटर के घूमने की दिशा को एक तीर द्वारा दर्शाया जाता है।
यदि आप मानसिक रूप से मशीन को क्लैंप K के बीच से गुजरने वाली त्रिज्या के साथ काटते हैं और इसे एक विमान में बदल देते हैं, तो स्टेटर वाइंडिंग और रोटर पोल (साइड और प्लान) की सापेक्ष स्थिति को एक योजनाबद्ध ड्राइंग के साथ चित्रित किया जाएगा:
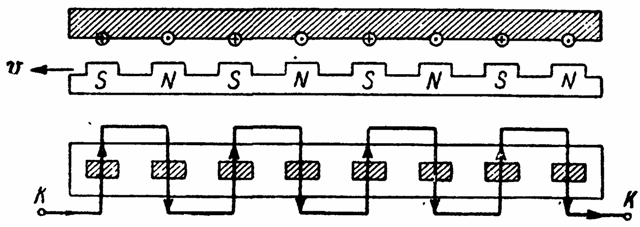
आकृति को ध्यान में रखते हुए, हम यह सुनिश्चित करते हैं कि सभी सक्रिय तार (प्रारंभ करनेवाला के ध्रुवों से गुजरते हुए) एक दूसरे से श्रृंखला में जुड़े हुए हैं और उनमें प्रेरित ईएमएफ का योग है। सभी ईएमएफ के चरण स्पष्ट रूप से समान हैं।रोटर के एक पूर्ण घुमाव के दौरान, प्रत्येक तार में (और इसलिए बाहरी सर्किट में) वर्तमान परिवर्तन की चार पूर्ण अवधि प्राप्त की जाएगी।
यदि किसी विद्युत मशीन में ध्रुवों के p जोड़े हैं और रोटर प्रति सेकंड n परिक्रमण करते हुए घूमता है, तो मशीन द्वारा प्राप्त प्रत्यावर्ती धारा की आवृत्ति f = pn hz है।
चूंकि नेटवर्क में EMF की आवृत्ति स्थिर होनी चाहिए, रोटरों के घूमने की गति स्थिर होनी चाहिए। तकनीकी आवृत्ति (50 हर्ट्ज) की ईएमएफ प्राप्त करने के लिए, रोटर ध्रुवों की संख्या काफी बड़ी होने पर अपेक्षाकृत धीमी घूर्णन का उपयोग किया जा सकता है।
तीन चरण की धारा प्राप्त करने के लिए, स्टेटर बॉडी में तीन अलग-अलग वाइंडिंग लगाई जाती हैं। उनमें से प्रत्येक इंडक्टर्स के आसन्न (विपरीत) ध्रुवों के बीच चाप दूरी के एक तिहाई से अन्य दो के सापेक्ष ऑफसेट है।
यह सत्यापित करना आसान है कि जब इंडिकेटर्स घूमते हैं, तो ईएमएफ 120 ° द्वारा चरण (समय में) में स्थानांतरित किए गए कॉइल में प्रेरित होते हैं। कॉइल्स के सिरों को मशीन से हटा दिया जाता है और उन्हें स्टार या डेल्टा में जोड़ा जा सकता है।
एक जनरेटर में, क्षेत्र और कंडक्टर की सापेक्ष गति रोटर के व्यास, प्रति सेकंड रोटर के क्रांतियों की संख्या और ध्रुव जोड़े की संख्या से निर्धारित होती है।

यदि जनरेटर जल प्रवाह (हाइड्रोजनरेटर) द्वारा संचालित होता है, तो यह आमतौर पर धीमी गति से बनाया जाता है। वांछित वर्तमान आवृत्ति प्राप्त करने के लिए, ध्रुवों की संख्या में वृद्धि करना आवश्यक है, जिसके लिए रोटर के व्यास में वृद्धि की आवश्यकता होती है।
कई तकनीकी कारणों से शक्तिशाली हाइड्रोजन जनरेटर उनके पास आमतौर पर एक ऊर्ध्वाधर शाफ्ट होता है और हाइड्रोलिक टरबाइन के ऊपर स्थित होता है, जिससे वे घूमते हैं।

भाप टर्बाइन संचालित जेनरेटर - टर्बाइन जेनरेटर आमतौर पर उच्च गति वाले होते हैं। यांत्रिक बलों को कम करने के लिए, उनके पास छोटे व्यास और तदनुसार छोटी संख्या में ध्रुव होते हैं।कई तकनीकी कारणों से क्षैतिज शाफ्ट के साथ टरबाइन जनरेटर के उत्पादन की आवश्यकता होती है।
यदि जनरेटर एक आंतरिक दहन इंजन द्वारा संचालित होता है, तो इसे डीजल जनरेटर कहा जाता है, क्योंकि डीजल इंजन आमतौर पर ऐसे इंजन के रूप में उपयोग किए जाते हैं जो सस्ते ईंधन की खपत करते हैं।

जनरेटर प्रतिवर्तीता, तुल्यकालिक मोटर्स
यदि किसी बाहरी स्रोत से जनरेटर के स्टेटर वाइंडिंग पर एक वैकल्पिक वोल्टेज लगाया जाता है, तो प्रारंभ करनेवाला के ध्रुवों की स्टेटर में उत्पन्न धारा के चुंबकीय क्षेत्र के साथ बातचीत होगी, और उसी दिशा से टॉर्क कार्य करेगा सभी ध्रुवों पर।
यदि रोटर इतनी गति से घूमता है कि शीघ्र ही प्रत्यावर्ती धारा की आधी अवधि के बाद, प्रारंभ करनेवाला का अगला ध्रुव (पहले ध्रुव के विपरीत संकेत) स्टेटर वाइंडिंग के माने गए तार के नीचे फिट हो जाएगा, तो संकेत इसके और धारा के बीच परस्पर क्रिया बल, जिसने अपनी दिशा बदल दी है, वही रहेगा।
इन शर्तों के तहत, रोटर, टोक़ के निरंतर प्रभाव के तहत, आगे बढ़ना जारी रखेगा और किसी भी तंत्र को चलाने में सक्षम होगा। रोटर की गति के प्रतिरोध पर काबू पाना नेटवर्क द्वारा खपत ऊर्जा के कारण होगा, और जनरेटर एक इलेक्ट्रिक मोटर बन जाएगा.

हालांकि, यह ध्यान दिया जाना चाहिए कि निरंतर गति केवल रोटेशन की कड़ाई से परिभाषित गति पर ही संभव है, क्योंकि इससे विचलन के मामले में एक त्वरित गति रोटर के प्रत्येक ध्रुव पर आंशिक रूप से कार्य करेगी, जो दो कंडक्टरों के बीच चलती है। स्टेटर, समय का हिस्सा - रुकना।
इस प्रकार, मोटर के घूमने की गति को कड़ाई से निर्धारित किया जाना चाहिए, - जिस समय के दौरान पोल को अगले एक से बदल दिया जाता है, वह वर्तमान की आधी अवधि के साथ मेल खाना चाहिए, यही कारण है कि ऐसे मोटर्स को कहा जाता है तुल्यकालिक.
यदि एक स्थिर रोटर के साथ स्टेटर वाइंडिंग पर एक वैकल्पिक वोल्टेज लागू किया जाता है, तो, हालांकि वर्तमान अनुभव के पहले आधे चक्र के दौरान रोटर के सभी ध्रुव एक ही चिन्ह के टॉर्क की क्रिया का अनुभव करते हैं, फिर भी, जड़ता के कारण, रोटर के पास चलने का समय नहीं होगा। अगले आधे चक्र में, सभी रोटर ध्रुवों के लिए बलाघूर्ण का चिह्न विपरीत में बदल जाएगा।
नतीजतन, रोटर कंपन करेगा लेकिन घुमाने में सक्षम नहीं होगा। इसलिए, सिंक्रोनस मोटर को पहले घाव किया जाना चाहिए, अर्थात, क्रांतियों की सामान्य संख्या में लाया जाना चाहिए, और उसके बाद ही स्टेटर वाइंडिंग में करंट को चालू किया जाना चाहिए।
तुल्यकालिक मोटर्स का विकास यांत्रिक विधियों (कम शक्तियों पर) और विशेष विद्युत उपकरणों (उच्च शक्तियों पर) द्वारा किया जाता है।
छोटे भार परिवर्तनों के लिए, नए भार के अनुकूल होने के लिए मोटर गति स्वचालित रूप से बदल जाएगी। इसलिए, जैसे ही मोटर शाफ्ट पर भार बढ़ता है, रोटर तुरंत धीमा हो जाता है। इसलिए, स्टेटर वाइंडिंग में प्रारंभ करनेवाला द्वारा प्रेरित लाइन वोल्टेज और विपरीत प्रेरित ईएमएफ के बीच चरण बदलाव।
इसके अलावा, आर्मेचर रिएक्शन से इंडिकेटर्स का डिमैग्नेटाइजेशन होता है, इसलिए स्टेटर करंट बढ़ता है, इंडिकेटर्स बढ़े हुए टॉर्क का अनुभव करते हैं, और बढ़े हुए लोड पर काबू पाने के लिए मोटर फिर से सिंक्रोनाइज़ करना शुरू कर देता है। इसी तरह की प्रक्रिया लोड में कमी के साथ होती है।
लोड में तेज उतार-चढ़ाव के साथ, मोटर की यह अनुकूलता अपर्याप्त हो सकती है, इसकी गति में काफी बदलाव आएगा, यह "सिंक्रनिज़्म से बाहर हो जाएगा" और अंततः बंद हो जाएगा, जबकि स्टेटर में प्रेरित इंडक्शन ईएमएफ गायब हो जाता है, और इसमें करंट बढ़ जाता है तेजी से। इसलिए लोड में तेज उतार-चढ़ाव से बचना चाहिए। मोटर को रोकने के लिए, स्पष्ट रूप से आपको पहले स्टेटर सर्किट को डिस्कनेक्ट करना होगा और फिर चोक को डिस्कनेक्ट करना होगा; इंजन शुरू करते समय, आपको संचालन के विपरीत क्रम का पालन करना चाहिए।
सिंक्रोनस मोटर्स का उपयोग अक्सर उन तंत्रों को चलाने के लिए किया जाता है जो एक स्थिर गति से काम करते हैं। यहां सिंक्रोनस मोटर्स के फायदे और नुकसान और उन्हें शुरू करने के तरीके बताए गए हैं: तुल्यकालिक मोटर और उनके अनुप्रयोग
शैक्षिक फिल्म पट्टी - "सिंक्रोनस मोटर्स", 1966 में शैक्षिक-दृश्य सहायक कारखाने द्वारा बनाई गई। आप इसे यहां देख सकते हैं: फिल्मस्ट्रिप «सिंक्रोनस मोटर»
