Selsyns: उद्देश्य, उपकरण, कार्रवाई का सिद्धांत
 Selsyns एक विशेष प्रकार की वैकल्पिक विद्युत मशीन है जिसमें कुछ वाट से लेकर कई सौ वाट (एक किलोवाट से कम) की शक्ति होती है। उन उपकरणों के बीच विद्युतीय रूप से रोटेशन के यांत्रिक कोण को दूरस्थ रूप से प्रसारित करने के लिए सेल्सिन की सेवा करता है जिनका एक दूसरे से कोई यांत्रिक संबंध नहीं है।
Selsyns एक विशेष प्रकार की वैकल्पिक विद्युत मशीन है जिसमें कुछ वाट से लेकर कई सौ वाट (एक किलोवाट से कम) की शक्ति होती है। उन उपकरणों के बीच विद्युतीय रूप से रोटेशन के यांत्रिक कोण को दूरस्थ रूप से प्रसारित करने के लिए सेल्सिन की सेवा करता है जिनका एक दूसरे से कोई यांत्रिक संबंध नहीं है।
प्रत्येक सेल्सिन में एक स्टेटर और एक रोटर होता है, जिस पर प्रत्यावर्ती धारा वाइंडिंग स्थित होती है। स्टेटर पर सिंगल वाइंडिंग के साथ कॉइल हैं और रोटर पर तीन वाइंडिंग के साथ वाइंडिंग है, और इसके विपरीत, स्टेटर पर तीन वाइंडिंग की वाइंडिंग और रोटर पर एक वाइंडिंग के साथ वाइंडिंग है, और अंत में, वाइंडिंग के साथ स्टेटर पर तीन वाइंडिंग और रोटर पर एक ही वाइंडिंग के साथ।
ऑटोरेग्यूलेशन योजनाओं में उनके उद्देश्य के अनुसार, सेलसिन्स को विभाजित किया गया है:
- सेलसिन सेंसर,
- सेलसिन रिसीवर
- अंतर।
सेल्सिन के संचालन को समझने के लिए, चित्र पर विचार करें। 1, ए।
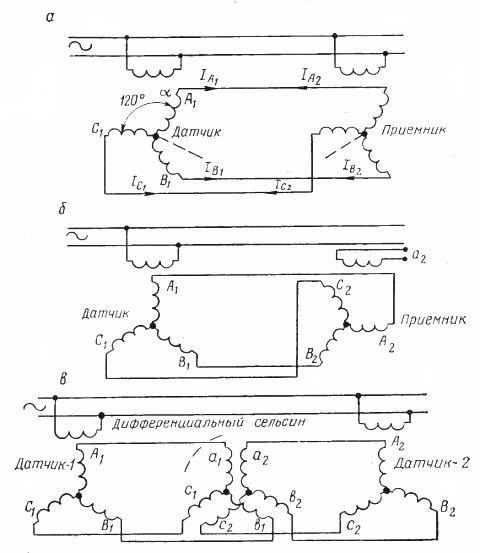
चावल। 1. सेल्सिन चालू करने की योजनाएँ: ए - सिस्टम सेंसर के अनुसार - रिसीवर; बी - ट्रांसफार्मर मोड में ट्रांसफार्मर रिसीवर; सी - अंतर
सेल्सिन-सेंसर और सेल्सिन-रिसीवर उनके सिंगल-वाइंडिंग स्टेटर वाइंडिंग के साथ एक ही एसी नेटवर्क से जुड़े होते हैं, और तीन-वाइंडिंग रोटर वाइंडिंग एक दूसरे से जुड़े होते हैं। यदि आप अब सेंसर रोटर को किसी भी कोण पर घुमाते हैं, तो रिसीवर का रोटर उसी कोण पर घूमेगा। यदि सेंसर रोटर एक यादृच्छिक गति से लगातार घूमता है, तो रिसीवर का रोटर उसी गति से घूमेगा।
सेल्सिन कनेक्शन की क्रिया विद्युत चुम्बकीय प्रेरण के सिद्धांत पर आधारित है, जो इस प्रकार है। सिंगल-वाइंडिंग स्टेटर वाइंडिंग में प्रत्यावर्ती धारा तीन-वाइंडिंग रोटर वाइंडिंग में धाराओं को प्रेरित करती है, जिसके मान रोटर और स्टेटर वाइंडिंग्स की सापेक्ष स्थिति पर निर्भर करते हैं।
यदि दो सेल्सिन के रोटार उनके स्टेटर के संबंध में समान दूरी पर हैं, तो रोटर के कनेक्टिंग तारों में धाराएं एक दूसरे के बराबर और विपरीत होती हैं, और इसलिए प्रत्येक कॉइल में करंट शून्य होता है। नतीजतन, दोनों सेल्सिन का शाफ्ट टोक़ शून्य है।
यदि आप अब मैन्युअल रूप से या अन्यथा सेल्सिन सेंसर के रोटर को एक निश्चित कोण पर घुमाते हैं, तो रोटर्स के बीच धाराओं का संतुलन गड़बड़ा जाएगा, और सेल्सिन रिसीवर के शाफ्ट पर एक टॉर्क दिखाई देगा, जिसके कारण इसका रोटर घूमेगा , जबकि धाराओं का असंतुलन गायब हो जाता है। यानी जब तक यह रोटर सिंक्रोसेंसर के समान स्थिति नहीं ले लेता।

ऑटोरेग्यूलेशन सिस्टम में, सेलसिन रिसीवर अक्सर ट्रांसफॉर्मर मोड (चित्र 1, बी) में काम करता है। इस स्थिति में, रिसीवर का रोटर स्थिर होता है, और इसकी स्टेटर वाइंडिंग नेटवर्क से डिस्कनेक्ट हो जाती है। इस कुंडली में ई प्रेरित होता है। वगैरह। वी। रोटर की तरफ, जिसके वाइंडिंग के माध्यम से सेलसिन सेंसर के रोटर की स्थिति के कारण धाराएं बहती हैं।इसका मतलब है कि ई का मूल्य। वगैरह। टर्मिनलों के साथ, रिसीवर का रोटर सेंसर के रोटेशन के कोण के समानुपाती होता है।
प्रारंभिक स्थिति में, रोटार एक दूसरे के सापेक्ष 90 ° विस्थापित होते हैं, और इस मामले में ई। वगैरह। एस शून्य है। अब जबकि रोटर सेंसर को घुमा दिया गया है, e को रिसीवर रोटर पर प्रेरित किया जाएगा। वगैरह। ईपी के साथ, रोटर्स के विचलन के कोण के आनुपातिक
Epr = Emax x sinθ
डिफरेंशियल सेल्सिन का उपयोग उन मामलों में किया जाता है जहां दो अक्षों के रोटेशन कोणों में अंतर को नियंत्रित करना आवश्यक होता है, अर्थात। उनकी विसंगति। इस मामले में, दो सेल्सिन सेंसर दो शाफ्ट पर स्थित होते हैं, जिनमें से गति की तुलना एक दूसरे के साथ की जाती है। इन सेल्सिन के रोटार तीन-घुमावदार वाइंडिंग द्वारा स्टेटर के तीन-घुमावदार वाइंडिंग और तीसरे के रोटर से जुड़े होते हैं। सेल्सिन, जो अंतर है (चित्र 1, में)। सेल्सिन डिफरेंशियल रोटर का रोटेशन एंगल, सेलसिन सेंसर के रोटेशन एंगल्स के बीच के अंतर के बराबर है।