चरण मीटर और सिंक्रोस्कोप
 चरण मीटर का उपयोग चरण कोण को निर्धारित करने के लिए किया जाता है, उदाहरण के लिए, वोल्टेज के संबंध में एक वैकल्पिक प्रवाह के कारण।
चरण मीटर का उपयोग चरण कोण को निर्धारित करने के लिए किया जाता है, उदाहरण के लिए, वोल्टेज के संबंध में एक वैकल्पिक प्रवाह के कारण।
चरण मीटर के माप तंत्र के स्थिर भाग में तीन कॉइल शामिल हैं, जिनमें से दो में 1 और 2 में फ्रेम का आकार है। वे एक दूसरे के सापेक्ष 120 ° (चित्र 1, ए) के कोण पर स्थानांतरित हो जाते हैं। बेलनाकार कॉइल 3 कॉइल 1 और 2 के अंदर चल भाग के साथ समाक्षीय रूप से स्थित है।
जंगम भाग एक अक्ष 4 द्वारा बनता है, जिसके सिरों पर पतली प्लेटों के रूप में कोर 5 जुड़े होते हैं, एक दूसरे से 180 ° ऑफसेट होते हैं और पंखुड़ी कहलाते हैं। धुरी और पंखुड़ियाँ नरम चुंबकीय सामग्री से बनी होती हैं और एक Z- आकार की संरचना बनाती हैं (चित्र 1, b)। मापने के तंत्र में वसंत द्वारा निर्मित विपरीत क्षण नहीं होता है, इसलिए विचाराधीन उपकरण को अनुपात के लिए जिम्मेदार ठहराया जा सकता है।
अंजीर में। 2 चरण मीटर पर स्विच करने की योजना दिखाता है। वाइंडिंग 1 और 2 को तीन-चरण लाइन के दो तारों के कट में शामिल किया गया है, और वाइंडिंग 3 एक प्रतिरोधक आरडी के साथ श्रृंखला में है, जिसमें एक महत्वपूर्ण सक्रिय प्रतिरोध है, जो कि मुख्य वोल्टेज से जुड़ा है।इन वाइंडिंग्स के माध्यम से बहने वाली रैखिक धाराओं को चरण में 120 ° से एक दूसरे के सापेक्ष स्थानांतरित किया जाता है, जिसके संबंध में वाइंडिंग 1 और 2 एक घूर्णन चुंबकीय प्रवाह F12 बनाते हैं, जैसे कि वे एक लोड करंट वेक्टर का प्रतिनिधित्व करते हैं। इसके घूमने की आवृत्ति धाराओं I1 और I2 की आवृत्ति पर निर्भर करती है। एक अवधि में, प्रवाह F12 एक पूर्ण क्रांति करता है।
चूँकि प्रतिरोधक Rq का प्रतिरोध कॉइल 3 की प्रतिक्रिया की तुलना में बड़ा है, वर्तमान Az3 लाइन वोल्टेज के साथ चरण में है। कुंडल 3, वर्तमान में साइनसोइडल परिवर्तन के परिणामस्वरूप, एक स्पंदित चुंबकीय प्रवाह F3 बनाता है, जो साइनसॉइडल के करीब है। इस प्रवाह की समरूपता का अक्ष अंतरिक्ष में स्थिर होता है और हमेशा तंत्र के गतिमान भाग के अक्ष के साथ मेल खाता है। प्रवाह F3 जंगम भाग, पंखुड़ियों और निश्चित बाहरी बेलनाकार चुंबकीय सर्किट के अक्ष 4 के साथ बंद है।
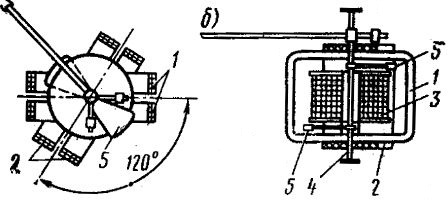
चावल। 1. Z- आकार का कोर इलेक्ट्रोमैग्नेटिक सिस्टम अनुपात मापने का तंत्र
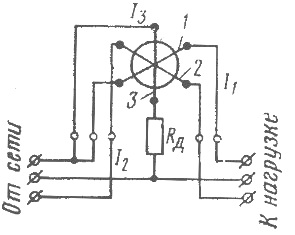
चावल। 2. विद्युत चुम्बकीय प्रणाली के चरण मीटर का सर्किट आरेख
फ्लक्स F12 और F3, अलग-अलग विमानों में बंद हैं, मापने के तंत्र के चलते हुए हिस्से को चुम्बकित करते हैं। चूँकि प्रवाह F12 का मान स्थिर है, अक्ष और पंखुड़ियों का चुंबकीयकरण उस समय उच्चतम मूल्य तक पहुँच जाता है जब प्रवाह F3 सबसे बड़े मान से गुजरता है। जड़त्वीय बलों की कार्रवाई के कारण, जंगम हिस्सा अपने सबसे बड़े चुंबकत्व के अनुरूप स्थिति में गतिहीन होता है, अर्थात उस समय घूर्णन प्रवाह F12 की स्थिति जब प्रवाह F3 अपने अधिकतम मूल्य तक पहुँच जाता है।
यह ध्यान में रखा जाना चाहिए कि प्रवाह F3 के पारित होने के क्षण में डिवाइस के स्थिर भाग के सापेक्ष घूर्णन प्रवाह की स्थिति और आयाम के मूल्य के माध्यम से वर्तमान Аз3 लोड वर्तमान के बीच कोण φ परिवर्तन पर निर्भर करता है और वोल्टेज। इसे देखते हुए, स्केल के संबंध में मूविंग पार्ट (और, तदनुसार, डिवाइस के पॉइंटर) द्वारा कब्जा की गई स्थिति, अर्थात। कोण α लोड करंट और वोल्टेज के बीच फेज शिफ्ट की विशेषता है।
इस सिद्धांत पर काम करने वाला एक फेजोमीटर कैपेसिटिव और इंडक्टिव लोड के साथ फेज शिफ्ट को मापता है। डिवाइस के पैमाने को कोणीय मूल्यों में स्नातक किया जा सकता है φ या cosφ... पहले मामले में यह एक समान है, दूसरे में यह असमान है।
फासोमीटर Ts302
सिंक्रोनोस्कोप
विचाराधीन माप तंत्र का उपयोग सिन्क्रोस्कोप में भी किया जाता है, समानांतर ऑपरेशन के लिए सिंक्रोनस जनरेटर को कनेक्ट करते समय उपयोग किया जाने वाला उपकरण।
सिन्क्रोस्कोप पर स्विच करने का आरेख अंजीर में दिखाया गया है। 3.
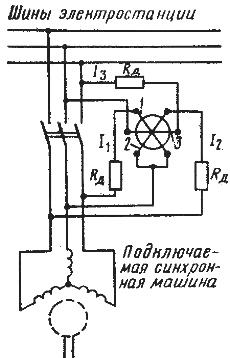
चावल। 3. इलेक्ट्रोमैग्नेटिक सिस्टम के सिंक्रोनोस्कोप का सर्किट आरेख
माप तंत्र के कॉइल 1, 2 और 3 का निर्माण चरण मीटर के संबंधित कॉइल के निर्माण के समान है, लेकिन वे पतले तांबे के तार से बने होते हैं, जिसके परिणामस्वरूप कॉइल बड़ी संख्या में घुमाव होते हैं महत्वपूर्ण प्रतिरोध है। कॉइल 3 नेटवर्क के लाइन वोल्टेज से जुड़ा है, कॉइल 1 और 2 - कनेक्टेड सिंक्रोनस मशीन के लाइन वोल्टेज से। प्रतिरोधक कॉइल आर और इसी तरह श्रृंखला में जुड़े हुए हैं।
जैसा कि उल्लेख किया गया है, मापने के तंत्र का गतिमान भाग तीन कॉइल के परिणामी चुंबकीय क्षेत्र में लगाया जाता है ताकि गतिमान भाग के लोबों की धुरी घूर्णन क्षेत्र F12 की दिशा के साथ मेल खाती है, जिसमें इसे कैप्चर किया जाएगा। स्पंदित क्षेत्र F3 का आयाम मान।
कॉइल की वाइंडिंग में करंट की समान आवृत्ति पर मूविंग पार्ट के लोब की यह स्थिति कॉइल 1, 2 और करंट Az3 की वाइंडिंग में करंट I1 और Az2 के बीच फेज शिफ्ट पर निर्भर करती है। कुंडल 3। धाराएँ I1 और Az2 व्यावहारिक रूप से चरण में सिंक्रोनस जनरेटर के लाइन वोल्टेज और वर्तमान Az3 के साथ मेल खाते हैं - मुख्य वोल्टेज के साथ (प्रतिरोध Rq के प्रतिरोध से महान है)।
परिणामस्वरूप ° С इस प्रकार, सिंक्रोस्कोप का संकेत देने वाला उपकरण, जब मुख्य धारा और जुड़े जनरेटर की आवृत्तियाँ बराबर होती हैं, तो इन तीन-चरण प्रणालियों के लाइन वोल्टेज के बीच चरण बदलाव को सीधे इंगित करेगा।
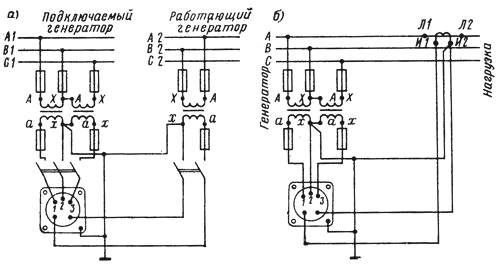
चावल। 4. कनेक्शन आरेख: ए - सिंक्रोस्कोप, बी - विद्युत चुम्बकीय प्रणाली का चरण

चावल। 5. सिंक्रोनोस्कोप प्रकार E1605
सिंक्रनाइज़ करते समय, मुख्य धारा की आवृत्ति और जुड़े जनरेटर की धारा समान नहीं होती है। इसके परिणामस्वरूप लाइन वोल्टेज और ई के बीच चरण कोण में निरंतर परिवर्तन होता है। वगैरह। वी। जनरेटर और इसलिए स्थिर कॉइल के सापेक्ष पंखुड़ियों की स्थिति में बदलाव। चूँकि सिंक्रोस्कोप के चल भाग को किसी भी कोण पर घुमाया जा सकता है, सूचक घूमता है।
रोटेशन की दिशा मुख्य और जुड़े जनरेटर के बीच आवृत्ति अंतर के संकेत पर निर्भर करती है। यह अंतर जितना छोटा होगा, सिंक्रोस्कोप पॉइंटर का रोटेशन उतना ही धीमा होगा।
डिवाइस के पैमाने में वोल्टेज वैक्टर और ई की एंटीपेज़ स्थिति के अनुरूप एक चिन्ह होता है। वगैरह।v। सिंक्रनाइज़ ऑब्जेक्ट्स। ई के वैक्टर की गैस मास्क स्थिति के दौरान सिंक्रोनस मशीन को स्टेशन बसों से जोड़ा जाना चाहिए। वगैरह। पीपी। और बस वोल्टेज।
अंजीर में। 4 एक इलेक्ट्रोमैग्नेटिक फेज मीटर का वायरिंग आरेख और एक इलेक्ट्रोमैग्नेटिक सिंक्रोस्कोप का वायरिंग आरेख दिखाता है।