धातु काटने की मशीनों की सहायक ड्राइव के लिए इलेक्ट्रिक मोटर्स का चयन
 मशीन टूल्स पर सहायक ड्राइव (कैलिपर्स, हेड पैड्स, क्रॉस आर्म्स आदि के लिए क्विक ड्राइव्स) आमतौर पर शॉर्ट-टाइम लोड मोड में काम करते हैं। ऐसी अवधि के इलेक्ट्रिक ड्राइव के संचालन का तरीका, जिसमें इलेक्ट्रिक ड्राइव में शामिल सभी उपकरणों का तापमान ऑपरेशन के दौरान एक स्थिर मूल्य तक नहीं पहुंचता है और एक ठहराव के दौरान परिवेश के तापमान में कमी आती है, को अल्पकालिक कहा जाता है।
मशीन टूल्स पर सहायक ड्राइव (कैलिपर्स, हेड पैड्स, क्रॉस आर्म्स आदि के लिए क्विक ड्राइव्स) आमतौर पर शॉर्ट-टाइम लोड मोड में काम करते हैं। ऐसी अवधि के इलेक्ट्रिक ड्राइव के संचालन का तरीका, जिसमें इलेक्ट्रिक ड्राइव में शामिल सभी उपकरणों का तापमान ऑपरेशन के दौरान एक स्थिर मूल्य तक नहीं पहुंचता है और एक ठहराव के दौरान परिवेश के तापमान में कमी आती है, को अल्पकालिक कहा जाता है।
धातु काटने की मशीनों पर सहायक ड्राइव का परिचालन समय आमतौर पर कम होता है; यह 5-15 s से अधिक नहीं होता है, और केवल भारी मशीनों के लिए यह 1-1.5 मिनट तक पहुंचता है। इस समय (t <0.1T) के दौरान अनुमेय सीमा के भीतर एक अधिभार के साथ, इलेक्ट्रिक मोटर के पास सामान्य ओवरहीटिंग तक भी गर्म होने का समय नहीं होता है। इस मामले में विद्युत मोटर की रेटेड शक्ति अधिभार की स्थिति से निर्धारित होती है।
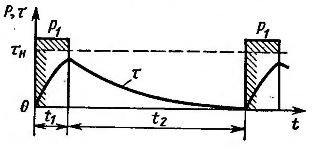
चावल। 1. लघु अवधि के संचालन के लिए लोड वक्र
सहायक ड्राइव के संचालन के दौरान प्रतिरोध एमसी का क्षण मुख्य रूप से घर्षण बलों द्वारा बनाया जाता है, और इसलिए इन ड्राइवों को मुख्य गति के ड्राइव के विपरीत, एक महत्वपूर्ण प्रारंभिक टोक़ की आवश्यकता होती है।
क्षैतिज रूप से गतिमान मशीन तत्व को स्थानांतरित करने पर घर्षण बल को दूर करने के लिए खपत की गई शक्ति:

जहाँ एफटीपी - घर्षण बल, एन; v — वेग, मी/से; जी - स्थानांतरित की जा रही इकाई का गुरुत्वाकर्षण (वजन), एन; μ - गति के घर्षण का गुणांक।
मोटर शाफ़्ट पावर P = Ptr /η,
जहां η - सी। पीडी ट्रांसमिशन, आमतौर पर η = 0.1 - 0.2।
माना मोड में ऑपरेशन के दौरान इलेक्ट्रिक मोटर का ताप नगण्य है। इसलिए, इसके अनुमेय अधिभार का उपयोग करने की अनुशंसा की जाती है।
रेटेड पावर पीएन = पीआरटी / (λη),
जहाँ λ - अनुमेय अधिभार का गुणांक।
मोटे तौर पर, यह माना जा सकता है कि इसके काम करने वाले हिस्से में इंजन की विशेषता स्पष्ट है। फिर अधिभार संचालन में मोटर का कोणीय वेग
ωλ = ωO (1 — λсн),
जहां, ωО = (πнО)/30- विद्युत मोटर की तुल्यकालिक कोणीय गति।
Pn = Ptr /(λη) सूत्र का उपयोग करके, मोटर का ओवरलोड टॉर्क ज्ञात करें
इंजन शुरू करने की शुरुआत में प्रतिरोध का क्षण उसके संचालन के दौरान अधिक होता है। इस पल
जहाँ μO — विरामावस्था में घर्षण गुणांक।
मशीन के सहायक ड्राइव के इलेक्ट्रिक मोटर्स का चयन करने की प्रक्रिया
सबसे पहले, Pn = Ptr /(λη) सूत्र का उपयोग करते हुए कैटलॉग से एक इलेक्ट्रिक मोटर का चयन किया जाता है, जिसके लिए शुरुआती टॉर्क Mnach निर्धारित किया जाता है। सूत्र द्वारा मसो आघूर्ण की गणना करें और आघूर्ण की तुलना मनच से करें।यदि 0.85 Mnig> Mso, तो चयनित मोटर सहायक ड्राइव के लिए उपयुक्त है।
मशीन इकाइयों को मोड़ने और उठाने के लिए ड्राइव की गणना एक समान तरीके से की जाती है, केवल बाद के मामले में मुख्य भार अक्सर स्थानांतरित इकाई के गुरुत्वाकर्षण बल (वजन) द्वारा बनाया जाता है।
उपकरण को वर्कपीस तक जल्दी से पहुंचाने के लिए इष्टतम गति का चयन करना विशेष महत्व है। उपकरण के पास पहुंचने पर, उच्च गति की गति को धीमी गति से काटने की गति से बदल दिया जाता है। यह गति परिवर्तन तब होता है जब उपकरण भाग से कुछ दूरी पर होता है, अन्यथा उपकरण तेज गति से भाग से टकराएगा और टूट जाएगा।
एक गति से दूसरी गति में जाने में कुछ समय लगता है। इस समय के दौरान, बिजली के उपकरण सक्रिय होते हैं और गति तेज गति से जारी रहती है।वोल्टेज में उतार-चढ़ाव और अन्य यादृच्छिक कारकों के प्रभाव के कारण उपकरण का प्रतिक्रिया समय बदल जाता है।
कीनेमेटिक श्रृंखला में गियर के उपयुक्त चयन द्वारा इष्टतम गति प्रदान की जाती है। सड़क के अंतिम खंड की गति में धीरे-धीरे या सहज स्वचालित कमी से समय में और कमी संभव है, जिससे उच्च प्रारंभिक गति को अपनाना संभव हो जाता है।