इलेक्ट्रिक होइस्ट और क्रेन बीम का इलेक्ट्रिक ड्राइव
 निलंबित विद्युत ट्रॉलियों (विद्युतीकृत होइस्ट, होइस्ट और क्रेन बीम) का उपयोग औद्योगिक परिसर में असेंबली और मरम्मत कार्य के दौरान भार और मशीन के पुर्जों को उठाने और स्थानांतरित करने के लिए किया जाता है। इलेक्ट्रिक होइस्ट, होइस्ट और क्रेन ब्रिज क्रेन से छोटे होते हैं, जो औद्योगिक भवनों के आकार को कम करते हैं और उनके रखरखाव के लिए योग्य कर्मियों की आवश्यकता नहीं होती है।
निलंबित विद्युत ट्रॉलियों (विद्युतीकृत होइस्ट, होइस्ट और क्रेन बीम) का उपयोग औद्योगिक परिसर में असेंबली और मरम्मत कार्य के दौरान भार और मशीन के पुर्जों को उठाने और स्थानांतरित करने के लिए किया जाता है। इलेक्ट्रिक होइस्ट, होइस्ट और क्रेन ब्रिज क्रेन से छोटे होते हैं, जो औद्योगिक भवनों के आकार को कम करते हैं और उनके रखरखाव के लिए योग्य कर्मियों की आवश्यकता नहीं होती है।
निलंबित इलेक्ट्रिक ट्रॉलियों को सख्ती से परिभाषित पथ के साथ उत्पादन सुविधाओं में माल उठाने और स्थानांतरित करने के लिए डिज़ाइन किया गया है।
एक इलेक्ट्रिक ट्रक (अंजीर। 1) में 3 मुख्य भाग होते हैं: एक लिफ्टिंग मैकेनिज्म (इलेक्ट्रिक होइस्ट) जिसे लिफ्ट (कम) और लोड को होल्ड करने के लिए डिज़ाइन किया गया है, एक मूवमेंट मैकेनिज्म (अंडरकैरिज) जिसे लिफ्ट किए गए लोड को कड़ाई से परिभाषित स्थिति दिशा में ले जाने के लिए डिज़ाइन किया गया है। , एक मोनोरेल जो दो दिशाओं में क्षैतिज गति को परिभाषित करती है।
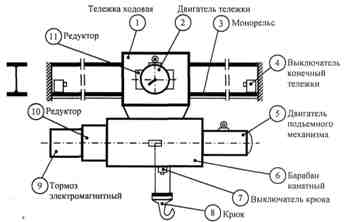
चावल। 1. निलंबित इलेक्ट्रिक कैरिज का किनेमेटिक आरेख
इलेक्ट्रिक होइस्ट एक काम करने वाली ट्रॉली पर लगाया जाता है और इसमें निम्नलिखित उपकरण शामिल होते हैं: लिफ्टिंग मैकेनिज्म की इलेक्ट्रिक मोटर (5), इलेक्ट्रिक मोटर के रोटेशन की गति को कम करने के लिए बेलनाकार गियरबॉक्स (10) जो एक दी गई रैखिक गति प्रदान करता है हुक को उठाना (कम करना), इलेक्ट्रोमैग्नेटिक ब्रेक (9), शाफ्ट की मोटर को रोकने के लिए जब यह मेन से डिस्कनेक्ट हो जाता है या नेटवर्क में वोल्टेज गायब हो जाता है, ब्रेकिंग ब्रेक सक्रिय हो जाता है, स्प्रिंग्स के बल पर कार्य करता है, जब शाफ्ट को शाफ्ट के चारों ओर लपेटा जाता है, हुक के लिमिट स्विच (7), हुक के उठाने को सीमित करने के लिए, जब दबाया जाता है, तो इंजन नेटवर्क से डिस्कनेक्ट हो जाता है और धीमा हो जाता है, रस्सी ड्रम (6), वाइंडिंग के लिए ( अनइंडिंग) और रस्सियों का भंडारण, हुक (8), उठा हुआ भार सुरक्षित करने के लिए।
अंडरकारेज को मोनोरेल (3) पर चढ़ाया जाता है, जो डबल रेल के निचले फ्लैंगेस पर चलने वाले पहियों द्वारा समर्थित होता है। एक इलेक्ट्रिक मोटर (2) द्वारा एक बेलनाकार गियरबॉक्स (11) के माध्यम से पहियों को चलाना।
मोनोरेल - क्षैतिज गति को सीमित करने के लिए सिरों पर सीमा स्विच (4) के साथ आई-बीम।
इलेक्ट्रिक होइस्ट TEP-1 (भार क्षमता 1 t, वोल्टेज 380 V) में अलग-अलग इलेक्ट्रिक ड्राइव के साथ लिफ्टिंग और मूविंग मैकेनिज्म होते हैं। काम करने वाला ड्रम 2 इंजन 20 द्वारा ग्रहीय गियरबॉक्स के माध्यम से संचालित होता है जिसमें उपग्रह 5, 7, 8, ब्लॉक गियर्स 13, सन गियर्स 6, 9, वाहक 14, 15 होते हैं। इंजन बंद होने पर मुख्य ड्राइव शाफ्ट 4 बंद हो जाता है। डिस्क 10 द्वारा वसंत 11 की कार्रवाई के तहत।
उठाने के तंत्र को 6.5-6.9 m / s की गति से चलाने के लिए, AOS-32-4M प्रकार की बढ़ी हुई पर्ची के साथ एक अतुल्यकालिक मोटर का उपयोग किया जाता है (1320 आरपीएम पर शक्ति 1.4 kW और कर्तव्य चक्र = 25%)।हुक की ऊपर की ओर गति एक सीमा स्विच द्वारा सीमित होती है।
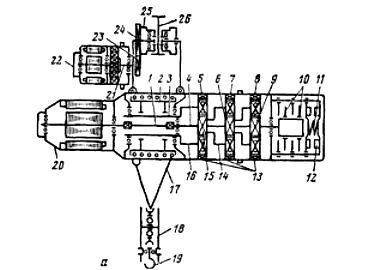
चावल। 2. इलेक्ट्रिक हॉइस्ट का इलेक्ट्रिक ड्राइव TEP -1: 1 — वर्किंग ड्रम, 3 — हॉलो शाफ्ट, 4 — वर्किंग शाफ्ट, 5, 7, 8 — सैटेलाइट, 6, 9, 15 — सन गियर्स, 10 — ब्रेक डिस्क, 11— ब्रेक स्प्रिंग, 12 — विद्युत चुम्बक, 13 — ब्लॉक गियर, 14, 16, 21 — वाहक, 17 — केबल, 18 — निलंबन, 19 — हुक, 20 — भार उठाने के लिए विद्युत मोटर, 22 — ट्रॉली विद्युत मोटर, 23, 24 — गियर्स, 25 — रोलर, 26 — मोनोरेल।
चित्र 3 लहरा के संचालन को दर्शाता है। जैसे ही लिफ्ट किए गए भार का द्रव्यमान बढ़कर 1000 किग्रा हो जाता है, विद्युत लहरा की दक्षता बढ़कर 0.58 हो जाती है।
लोड कम करते समय मोटर 4 के संचालन का एक दिलचस्प तरीका: जबकि लोड का वजन 425 किलोग्राम से कम है, इलेक्ट्रिक मोटर मोटर मोड में काम करती है, और जब द्रव्यमान 425 किलोग्राम से अधिक होता है - जनरेटर मोड में। इसलिए, भारोत्तोलन तंत्र के निष्क्रिय क्षण को दूर करने के लिए, 425 किलो वजन का भार पर्याप्त है।
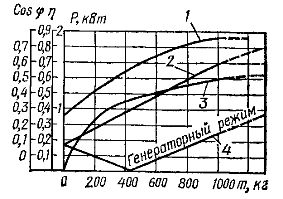
चावल। 3. विद्युत लहरा की परिचालन विशेषताएं: 1 - विद्युत मोटर की ssphi, 2 - भार उठाते समय विद्युत मोटर की शक्ति, 3 - दक्षता, 4 - भार को कम करते समय विद्युत मोटर की शक्ति।
इलेक्ट्रिक होइस्ट के अंडरकारेज को चलाने के लिए, एक एसिंक्रोनस इलेक्ट्रिक मोटर 22 (चित्र। 2) टीईएम-0.25 प्रकार (शक्ति 0.25 किलोवाट 1410 आरपीएम पर और कर्तव्य चक्र = 25%) एक अंतर्निर्मित ग्रहों के एकल-चरण गियरबॉक्स के साथ और गियर 23, 24, रोलर्स का ट्रांसमिटिंग रोटेशन 25। ब्रेकिंग डिवाइस सबसे सरल लहरा के आंदोलन तंत्र पर नहीं लगाए जाते हैं। दोनों दिशाओं में बीम के साथ लहरा की गति यांत्रिक स्टॉप द्वारा सीमित होती है।
 जिब क्रेन हॉइस्ट से इस मायने में भिन्न होता है कि वह बीम जिस पर हॉइस्ट यात्रा करता है, गिलहरी-पिंजरे या फेज रोटर इलेक्ट्रिक मोटर द्वारा संचालित उत्पादन कक्ष के चारों ओर घूम सकता है। क्रेन बीम ब्रिज, जिसमें एक इलेक्ट्रिक ड्राइव मैकेनिज्म होता है, सिंगल बीम के रूप में बनाया जाता है, जिस पर इलेक्ट्रिक अंडरकारेज चलता है।
जिब क्रेन हॉइस्ट से इस मायने में भिन्न होता है कि वह बीम जिस पर हॉइस्ट यात्रा करता है, गिलहरी-पिंजरे या फेज रोटर इलेक्ट्रिक मोटर द्वारा संचालित उत्पादन कक्ष के चारों ओर घूम सकता है। क्रेन बीम ब्रिज, जिसमें एक इलेक्ट्रिक ड्राइव मैकेनिज्म होता है, सिंगल बीम के रूप में बनाया जाता है, जिस पर इलेक्ट्रिक अंडरकारेज चलता है।
एक गिलहरी-पिंजरे रोटर के साथ तीन-चरण अतुल्यकालिक मोटर्स का उपयोग आउटबोर्ड इलेक्ट्रिक कारों को चलाने के लिए किया जाता है और केवल एक उच्च भार क्षमता के साथ और चरण रोटर के साथ भार-अतुल्यकालिक मोटर्स के गति विनियमन और चिकनी "लैंडिंग" की आवश्यकता होती है।
लोड की सुचारू लैंडिंग या क्रेन के सटीक स्टॉपिंग के लिए आवश्यक कम गति की कमी के कारण, कर्मचारी को समय-समय पर इलेक्ट्रिक मोटर्स को चालू और बंद करना चाहिए, और इससे स्टार्ट की संख्या बढ़ जाती है और वाइंडिंग्स के गर्म होने का कारण बनता है, और कम भी हो जाता है संपर्कों के प्रतिरोध पहनें। इसलिए, कुछ क्रेन में दो ऑपरेटिंग गति के साथ उठाने और यात्रा करने के लिए इलेक्ट्रिक ड्राइव होते हैं: नाममात्र और कम, जो सिंगल-स्पीड या अतिरिक्त माइक्रो ड्राइव के बजाय दो-स्पीड एसिंक्रोनस मोटर का उपयोग करके प्रदान की जाती हैं।
 कम गति (0.2 - 0.5 मीटर / सेकंड) गिलहरी-पिंजरे मोटर्स द्वारा संचालित निलंबित विद्युत ट्रॉलियों को आमतौर पर निलंबित का उपयोग करके फर्श (जमीन) स्तर से नियंत्रित किया जाता है पुश बटन स्टेशनों… ऑपरेटर के लिए एक केबिन के साथ हवाई ट्रॉलियों और क्रेन में (0.8 - 1.5 मीटर / सेकंड की गति से), एक चरण रोटर वाले मोटर्स को नियंत्रकों द्वारा नियंत्रित किया जाता है।
कम गति (0.2 - 0.5 मीटर / सेकंड) गिलहरी-पिंजरे मोटर्स द्वारा संचालित निलंबित विद्युत ट्रॉलियों को आमतौर पर निलंबित का उपयोग करके फर्श (जमीन) स्तर से नियंत्रित किया जाता है पुश बटन स्टेशनों… ऑपरेटर के लिए एक केबिन के साथ हवाई ट्रॉलियों और क्रेन में (0.8 - 1.5 मीटर / सेकंड की गति से), एक चरण रोटर वाले मोटर्स को नियंत्रकों द्वारा नियंत्रित किया जाता है।
हॉइस्ट और ओवरहेड क्रेन की इलेक्ट्रिक मोटर किसके द्वारा नियंत्रित की जाती है? प्रतिवर्ती चुंबकीय शुरुआत और एक लचीली बख़्तरबंद केबल से निलंबित बटन शुरू करें।KM1 (चित्र 4) को ऊपर उठाने, KM2 को कम करने, KMZ को आगे और पीछे KM4 को ले जाने के लिए कॉयल और संपर्ककर्ताओं के संपर्कों को वोल्टेज एक सर्किट ब्रेकर और एक केबल या संपर्क तारों के माध्यम से आपूर्ति की जाती है। उठाने वाले उपकरण की ऊपर की ओर गति एक सीमा स्विच द्वारा सीमित होती है। वर्ग।
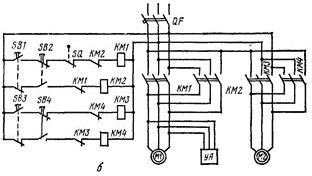
चावल। 4. क्रेन-बीम का इलेक्ट्रिक योजनाबद्ध आरेख
एक साथ स्विचिंग से मोटर्स के रिवर्सिंग कॉन्टेक्टर्स को ब्लॉक करना डबल सर्किट बटन और कॉन्टेक्टर्स के मैकेनिकल ब्लॉकिंग (या कॉन्टैक्टर्स के सहायक कॉन्टैक्ट्स को खोलना) के माध्यम से किया जाता है।
इलेक्ट्रिक हॉइस्ट और ओवरहेड क्रेन पर, स्टार्ट बटन संबंधित क्लोजिंग कॉन्टैक्टर इंटरलॉक कॉन्टैक्ट्स द्वारा बायपास नहीं किए जाते हैं, ऑपरेटर द्वारा पुश बटन पेंडेंट स्टेशन जारी करने के बाद होइस्ट को काम करना जारी रखने से रोकता है। लिफ्टिंग मोटर के साथ ही, UA सोलनॉइड सक्रिय होता है, जो ब्रेक खोलता है।
उठाने के तंत्र के लिए अधिकतम अनुमेय शुरुआती समय 3-5 एस है, आंदोलन तंत्र के लिए - 10-15 एस।
आप यह भी देख सकते हैं: बिजली के उपकरण और बिजली के झूलों की जंजीर
इलेक्ट्रिक ट्रक, इलेक्ट्रिक होइस्ट और ओवरहेड क्रेन के इंजन के संचालन का तरीका उनके उद्देश्य पर निर्भर करता है। यदि माल को कम दूरी पर पुल क्रेन पर ले जाया जाता है, तो इंजन एक शर्मनाक अल्पकालिक मोड में काम करते हैं (उदाहरण के लिए, कार्यशालाओं या गोदामों के अनुभागों की सेवा करने वाली ट्रॉलियों में)।

ओवरहेड क्रेन के लिए अपेक्षाकृत बड़ी दूरी पर संयंत्र के क्षेत्र में माल परिवहन के लिए, उठाने और चलने वाली मोटरों के ऑपरेटिंग मोड अलग-अलग होते हैं: पहला एक अल्पकालिक मोड की विशेषता है, दूसरा एक लंबी अवधि का। इलेक्ट्रिक होइस्ट, हॉइस्ट और गैन्ट्री क्रेन को उठाने और स्थानांतरित करने के लिए मोटर्स का निर्धारण उसी तरह से किया जाता है जैसे ओवरहेड क्रेन तंत्र के इंजनों के लिए।